Y
Hello,
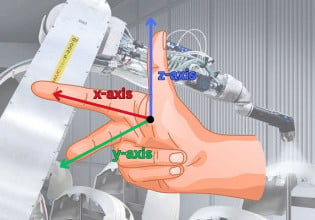
any controls guy can please help me to know why we give -10ma to +10 ma instead of voltages to servo coils for controlling hydraulic flow in servo valve for actuator? as per my understandings there is coil inside servo that operates armature and then fkapoer and spool for hydraulic flow. here I m confused that why can't we give voltage to coil instead of current?
[email protected]
any controls guy can please help me to know why we give -10ma to +10 ma instead of voltages to servo coils for controlling hydraulic flow in servo valve for actuator? as per my understandings there is coil inside servo that operates armature and then fkapoer and spool for hydraulic flow. here I m confused that why can't we give voltage to coil instead of current?
[email protected]