ABB Launches an All-in-One Collaborative Machine Tending Solution
ABB has released its latest Omnivance application cell, a machine tending system complete with a collaborative robot, gripper, tray system, controller, and even optional area scanners.
In manufacturing, computer numerically controlled (CNC) machines turn raw material into functional parts; the machine's caveat is that an operator is required to keep replacing the finished parts with raw materials. This process of constantly replacing workpieces is tedious and requires standing for long periods. Collaborative robots are often used in place of workers to tend machining centers because they do not require guarding, are simpler to program, and compensate for labor shortages.
To meet businesses' growing demands for collaborative CNC solutions, ABB has launched a complete machine tending cell, fixed with a cobot.
ABB’s Omnivance cell is an all-in-one solution designed to simplify machine tending. Image used courtesy of ABB
Omnivance Collaborative Machine Tending Cell
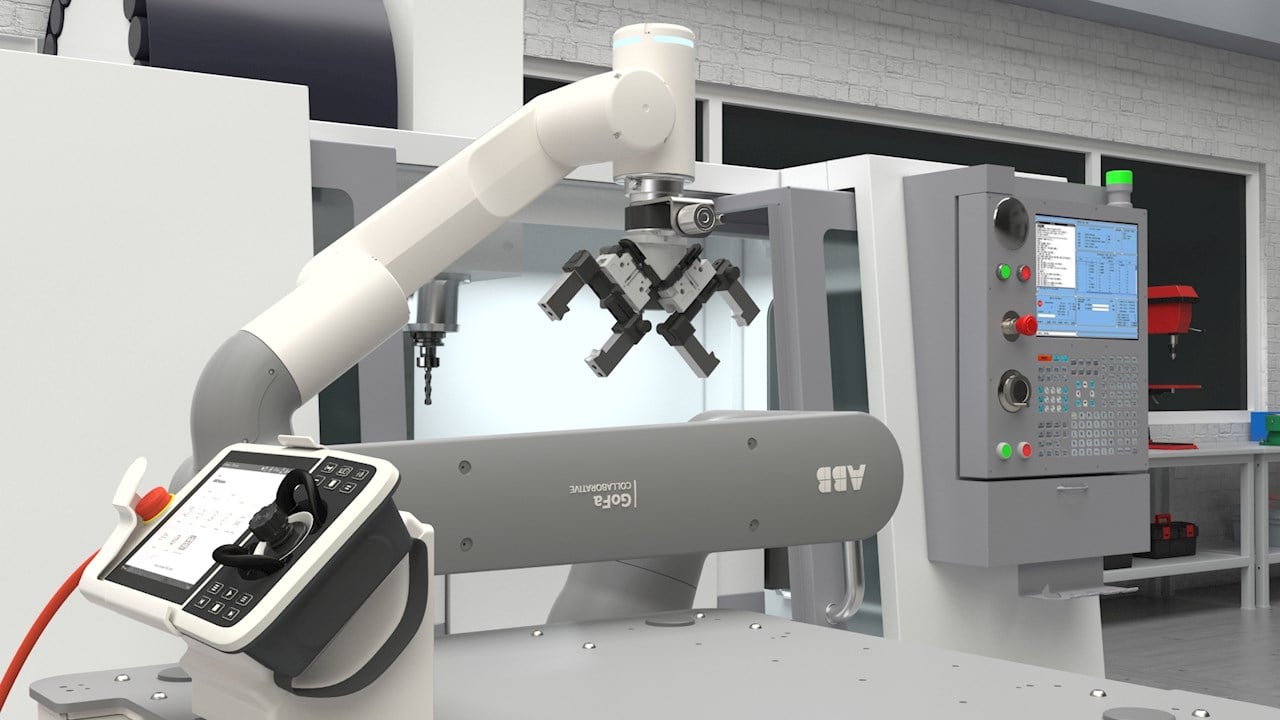
Using a collaborative robot to replenish parts in a machining center often requires custom grippers and some way of mounting the robot near the machine. ABB has taken the guesswork out of using a cobot to tend a machine with its new Omnivance Collaborative Machine Tending Cell. The Omnivance solution includes ABB’s GoFA 12 cobot on a mobile cart containing everything needed to get a machine-tending solution up and running quickly.
The GoFA 12 cobot is a 12 kg collaborative robot with a 1.27 m reach. The cobot is powered by ABB's Omnicore C30 controller, which has a web interface for configuration and programming. Onboard industrial communication protocols, such as ProfiNet or an Anybus universal gateway, are supported.

The Omnivance cell features a built-in Omnicore C30 controller. Image used courtesy of ABB
Automated Machine Tending
The cart can contain six trays with a maximum weight capacity of 60 kg or nine 120 kg trays. All of the trays come equipped with mechanical locks. The robot and controller are mounted to the side of the cart so that the top doubles as a work surface. The pendant and programming interface are mounted on the work surface with an integrated pendant holder.
ABB offers three gripper options: no gripper, single-ended, and double-ended. If selecting no gripper, the end user will need to develop a custom gripper and integrate it into the Omnicore system.
While a collaborative robot doesn't need safety guarding, if provided, it can run at higher speeds. The Omnivance cell has optional safety scanners that can be integrated into one or both sides of the cart. Powering the system requires 100/230 VAC at 50/60 Hz if using the provided robot and controller.
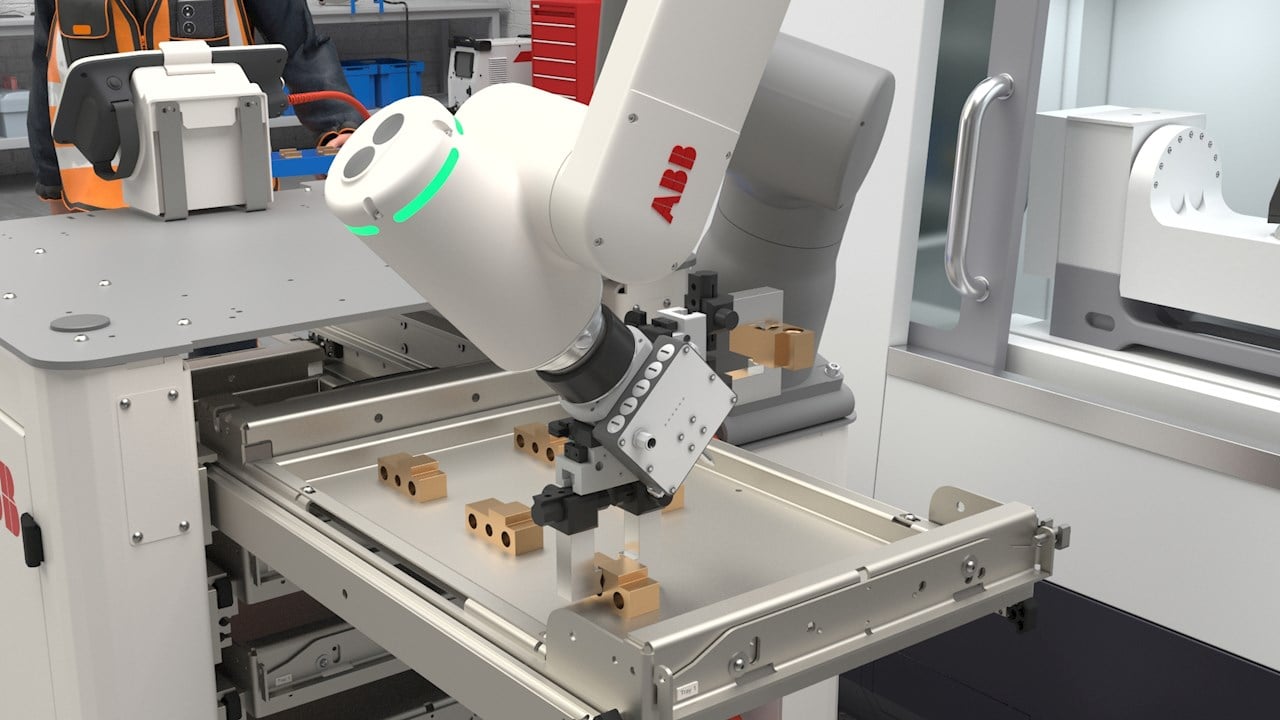
Users don’t need extensive robot programming experience to operate the Omnivance cell. Image used courtesy of ABB
Machine Tending With Collaborative Robots
Machining centers do not always produce the same part on the same machine; some shops are designed to run small to medium batch sizes of parts and then change their fixtures to run a completely different part. Installing a dedicated robotic tending system in a smaller shop might result in a longer return on investment.
Collaborative robots are easy to teach and reprogram, so using a system like ABB's Omnivance cell to exchange parts in a machine center is a natural choice. Mounting the robot on a mobile cart enables end users to position the robot in place, teach a few points, and allow the system to tend the machining center.
The cell’s programming interface does not require extensive robotics knowledge. For the machine builders, the Omnivance solution can be ordered stripped down or with ABB's robot programming language RAPID, which can be used to create more advanced functions.




