 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinFesto GripperAI Automates Mixed Product Robot Handling
GripperAI from Festo enables robots to handle mixed products automatically using AI-based gripping without repeated programming or template loading.
Festo has introduced GripperAI, an AI-based robotic handling software platform designed to simplify automation in mixed-product environments where SKU changes and random part placement create programming challenges. Running locally on an industrial PC with connected 3D vision hardware, the system automatically identifies products, calculates gripping points, selects appropriate tools, and retries failed picks without manual intervention. Compatible with industrial robots, collaborative robots, and Cartesian systems, GripperAI is built to reduce integration effort while supporting lower-cost vision hardware and existing robotic infrastructure. The platform aims to help manufacturers and distribution centers scale flexible handling operations without constant reprogramming or template management.

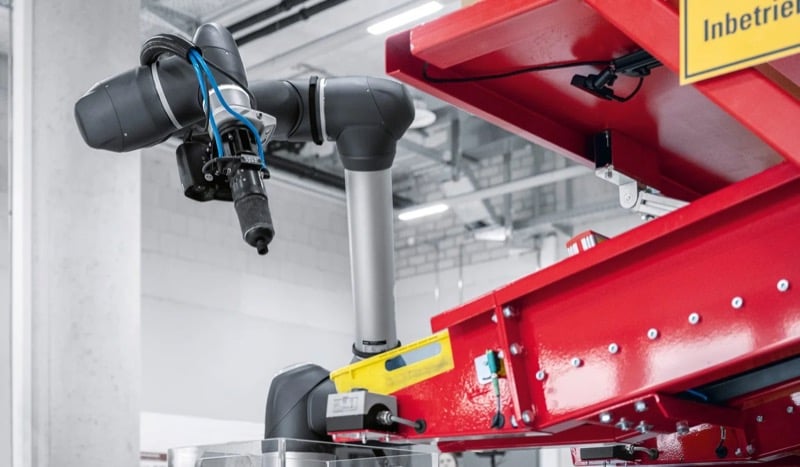
GripperAI allows robots to automatically identify, select, and grip changing products. Image used courtesy of Festo
Mixed Product Handling Without Constant Reprogramming
Robotic handling systems often work well when product dimensions remain fixed, but things become more complicated when facilities introduce frequent SKU changes, mixed products, or randomly arranged parts. In these environments, engineers often deal with repeated programming changes, vision tuning, and custom integration work, which increase deployment time and system costs.

AI-based gripping enables robots to automatically identify and handle various products. Images used courtesy of Festo
Festo designed GripperAI to reduce much of the integration work often associated with mixed-product handling. After setup steps such as camera alignment, lighting verification, and pick positions, the system's main goal is to run lights out. For each detected item, the software calculates a gripping point and sends motion instructions to the robot. If a pick is missed, the system recalculates and retries automatically instead of stopping the operation.
Designed Around Lower Cost Vision Hardware
Vision systems can be among the more expensive components of robotic handling deployments, particularly when high-end 3D hardware is required. Festo says GripperAI maintains the same software architecture across camera types, allowing users to select lower-cost 3D cameras when application requirements permit.
GripperAI enables robots to handle changing products without reprogramming. Image used courtesy of Festo
Many applications can use lower-cost 3D cameras unless packaging conditions or difficult product surfaces create imaging challenges. GripperAI runs locally on a standard industrial PC, eliminating the need for cloud processing or additional computing infrastructure. The software can also work with multiple vacuum and mechanical grippers, automatically selecting the most suitable tool for each product. Keeping processing and decision-making at the machine simplifies deployment while reducing overall system complexity.
Robot-Agnostic Design Supports Expansion
Gripper AI has been designed to work with industrial robots, collaborative robots, and even Cartesian pick-and-place systems that support path control, with the overall goal of allowing facilities to continue using existing robotic equipment while expanding capacity as needed, rather than tying users to a specific hardware ecosystem.
Würth Group has already implemented the technology at its distribution hub in Germany, where product variety and rising SKU counts have created handling challenges. The system uses a tool station containing multiple vacuum and mechanical grippers to handle products ranging from small USB devices to boxes weighing up to 44 lbs. By allowing the robot to determine gripping strategy automatically, the system addresses ergonomic concerns while maintaining throughput in higher-speed packaging operations.
GripperAI is designed to handle mixed products without creating a programming burden whenever product conditions change. By combining AI-driven gripping decisions, lower-cost vision hardware support, and compatibility with multiple robot platforms, Festo aims to reduce integration effort and make robotic handling systems easier to scale and maintain.












