 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
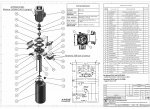
LinkedinHi, I am making a manifold to fit a Moog 761 servo valve to a hydraulic pump to move a ram up and down using a +-30mA signal, with a PID monitored by a glass linear encoder for feed back using a TTL signal, I am new to MOOG servo valves, and understand there is a P and X port, am I right in saying only one of these is to be used and the other blocked off, I am thinking of using the P port, is there any advantage to using the X port? I really don't understand why they have an option, Can anyone please explain?
MOOG Servo Valve 761 X Port
- Thread starter Rickstar
- Start date

| Thread starter | Similar threads | Forum | Replies | Date |
|---|---|---|---|---|
| T | Servo valve Moog installation | Power Generation | 6 | |
| A | Moog Servo Valve | Control Valves | 2 | |
| J | MOOG Servo Valve | General Automation Chat | 5 | |
| K | Moog Servo Valve Clarification on Operation and Its input. | General Automation Chat | 1 | |
| I | Moog servo valve | Power Generation | 4 |




