Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedinwe are trying to develop Autotune PID for temperature controller for maintaining temperature in Ovens & write autotune code in C languae.
1. We bought Delta Electronics PID controller DTI4848 & tried to check how they are doing auto tuning.
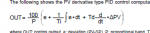
2. We can measure what temperature by placing our temperature sensor close to Delta temperature sensor. We observed below graph.
a) Blue line is temperature axis multiplied by 100. i.,e 8000 represent 80.0C
b) Red line is for output relay
c) Green arrowed line represent the Tu period for one complete cycle.
d) Yellow marks the max and min limits in time period Tu.
3. Its Åström–Hägglund method or saturation on/off relkay autuning process.
4. But in our case its different, temperature rises above setpoint much higher thean fall below it.
In this case how to find the amplitude? Can you please suggest?
Ku= (4*d)/(pi*y)
where d: is amiplude of Relay output, here we take value 100. Since we will take 100% duty cycle.
5. How to find Proportional band in this?

1. We bought Delta Electronics PID controller DTI4848 & tried to check how they are doing auto tuning.
2. We can measure what temperature by placing our temperature sensor close to Delta temperature sensor. We observed below graph.
a) Blue line is temperature axis multiplied by 100. i.,e 8000 represent 80.0C
b) Red line is for output relay
c) Green arrowed line represent the Tu period for one complete cycle.
d) Yellow marks the max and min limits in time period Tu.
3. Its Åström–Hägglund method or saturation on/off relkay autuning process.
4. But in our case its different, temperature rises above setpoint much higher thean fall below it.
In this case how to find the amplitude? Can you please suggest?
Ku= (4*d)/(pi*y)
where d: is amiplude of Relay output, here we take value 100. Since we will take 100% duty cycle.
5. How to find Proportional band in this?