 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinHow Derivatives and Integrals Relate to One Another

Derivatives and integrals perform opposite operations to each other, but there are some important exceptions due to the loss of constant values when deriving and the similar unknown constant when integrating.
Like many other mathematical operations, the derivative and the integral perform inverse operations from each other. Each operation performs a very specific task with many applications that are unable to be completed by relying on linear, algebraic formulas alone. Let us review some fundamental facts about both the derivative and the integral, then compare the implications of these facts side-by-side to compare the two operations.
Reviewing Derivatives
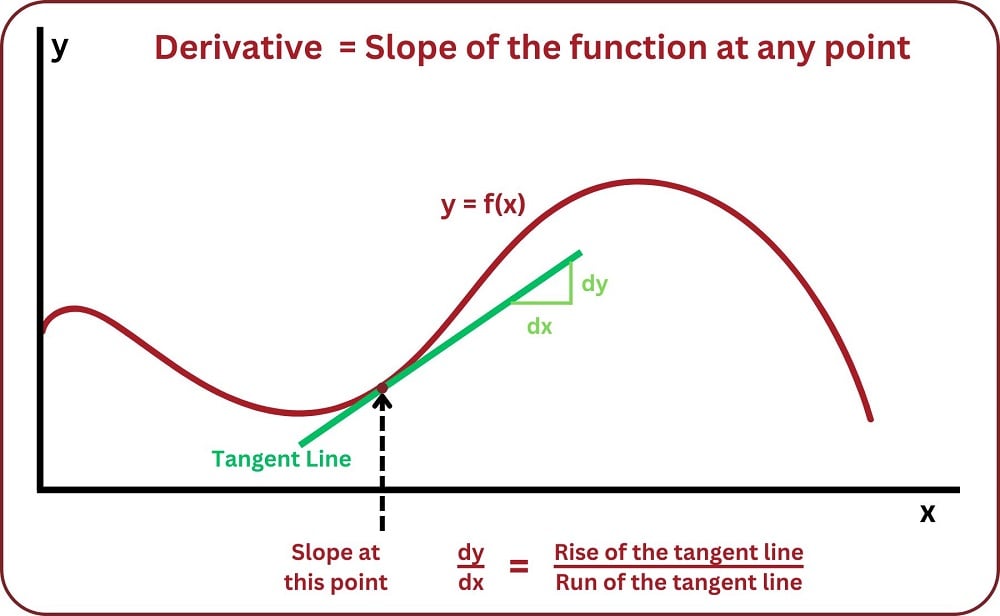
First, let us review some of the properties of differentials and derivatives, referencing the expression and graph shown below:
- A differential is an infinitesimal increment of change (difference) in some continuously changing variable, represented either by a lower-case Roman letter \(d\) or a lower-case Greek letter “delta” (\(\delta\)). Such a change in time would be represented as \(dt\); a similar change in temperature as \(dT\); a similar change in the variable \(x\) as \(dx\).
- A derivative is always a quotient of differences: a process of subtraction (to calculate the amount each variable changed) followed by division (to calculate the rate of one change to another change).
- The units of measurement for a derivative reflect this final process of division: one unit divided by some other unit (e.g. gallons per minute, feet per second).
- Geometrically, the derivative of a function is its graphical slope (its “rise over run”).
- When computing the value of a derivative, we must specify a single point along the function where the slope is to be calculated.
- The tangent line matching the slope at that point has a “rise over run” value equal to the derivative of the function at that point.
Reviewing Integrals
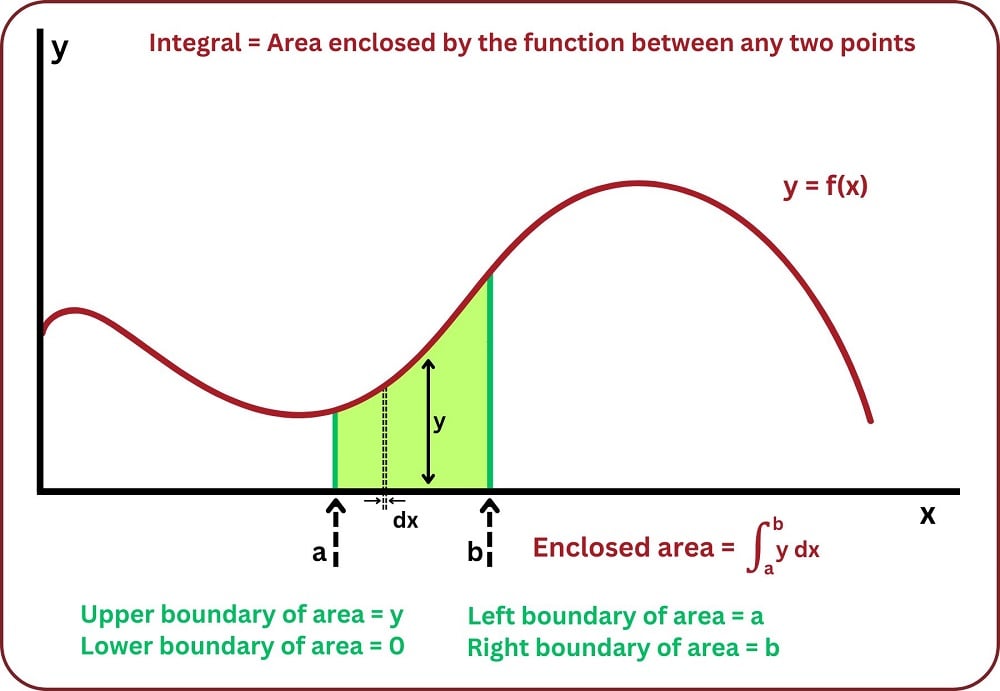
Next, let us review some of the properties of integrals, referencing the expression and graph shown below:
- An integral is always a sum of products: a process of multiplication (to calculate the product of two variables) followed by addition (to sum those quantities into a whole).
- The units of measurement for an integral reflect this initial process of multiplication: one unit times some other unit (e.g. kilowatt-hours, foot-pounds, volt-seconds).
- When computing the value of an integral, we must specify both the starting and ending points along the function defining the interval of integration (\(a\) and \(b\)).
- Geometrically, the integral of a function is the graphical area enclosed by the function and the interval boundaries.
- The area enclosed by the function may be thought of as illustrated below: the sum of an infinite number of extremely narrow rectangles, each rectangle having a height equal to one variable (\(y\)) and an infinitely small width equal to the differential of another variable (\(dx\)).
Derivatives vs Integrals
Just as division and multiplication are inverse mathematical functions (i.e. one “un-does” the other), differentiation and integration are also inverse mathematical functions. The two examples of propane gas flow and mass measurement highlighted in the previous sections illustrate this complementary relationship. We may use differentiation with respect to time to convert a mass measurement (\(m\)) into a mass flow measurement (\(W\), or \(dm \over dt\)). Conversely, we may use integration with respect to time to convert a mass flow measurement (\(W\), or \(dm \over dt\)) into a measurement of mass gained or lost (\(\Delta m\)).
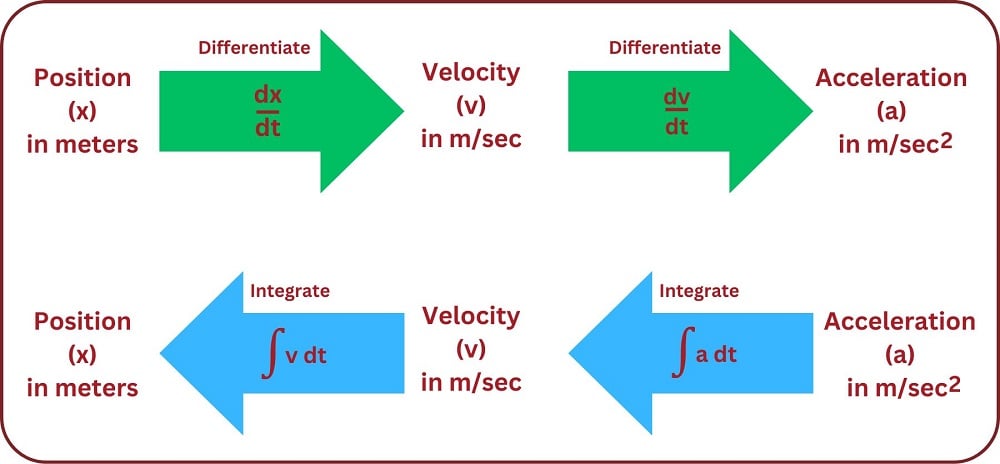
Likewise, the common examples of position (\(x\)), velocity (\(v\)), and acceleration (\(a\)) used to illustrate the principle of differentiation are also related to one another by the process of integration. Reviewing the derivative relationships:
| \(v = {dx \over dt}\) | Velocity is the derivative of position with respect to time |
| \(a = {dv \over dt}\) | Acceleration is the derivative of velocity with respect to time |
Now, expressing position and velocity as integrals of velocity and acceleration, respectively:
| \(x = \int v \> dt\) | Position is the integral of velocity with respect to time |
| \(v = \int a \> dt\) | Velocity is the integral of acceleration with respect to time |
Differentiation and integration may be thought of as processes transforming these quantities into one another. Note the transformation of units with each operation – differentiation always divides while integration always multiplies:
The inverse nature of these two calculus operations is codified in mathematics as the Fundamental Theorem of Calculus, shown here:
\[{d \over dx} \left[ \int_a^b f(x) \> dx \right] = f(x)\]
What this equation tells us is that the derivative of the integral of any continuous function is that original function. In other words, we can take any mathematical function of a variable that we know to be continuous over a certain range – shown here as \(f(x)\), with the range of integration starting at \(a\) and ending at \(b\) – integrate that function over that range, then take the derivative of that result and end up with the original function. By analogy, we can take the square-root of any quantity, then square the result and end up with the original quantity, because these are inverse functions as well.
Inconsistencies Due to Constant Values
While the math operations are indeed inverses of each other, we might find that we cannot arrive at the true knowledge of our position simply because we have recorded our acceleration. When we take the derivative of a function, we calculate its rate of change at that moment, but we lose the actual value at that moment. This actual value is a constant, and while we might now have great insight as to the changes in the system, we lose the part that is constant.
Going the other direction, if all we know about a system is its rate of change, we may be able to tell how far the system has moved during the elapsed time, but without a knowledge of the initial value, we will be unable to tell the final value.
Image a driving scenario. You are leaving town down a country highway, and shortly outside the town, the speed limit increases from 35 to 55 mph (that's roughly equal to 50 ft/s to 80 ft/s to make the math easy). Not wishing to accelerate too quickly, you press on the gas and steadily reach 55 mph after 30 seconds.
During this elapsed time, your rate of change, or 'rise over run' is (80-50) ft/s divided by 30 seconds. This makes the nice, round average acceleration result (derivative) of 1 ft/s2. We have now determined the rate of change of our velocity, or in other words, the second derivative of this motion system.
However, if we try to calculate the position of our car based on the given velocity information, we must integrate the velocity over the 30-second duration to determine the total distance traveled during that time.
An increase in velocity, or \(\Delta v\), of 80-50 ft/s over a \(\Delta t\) of 30 s gives a linear equation of v=t+50.
\[x = \int_0^{30} t+50 \> dt \]
While we may be able to figure out the ground we covered during those 30 seconds (which comes out to 1950 ft, a little more than 1/3 of a mile), we do not know where we were when the time period began. Therefore, we cannot accurately state exactly how far out of town we are when we reach 55 mph. If we are given the initial value, \(x_0\), then we can add this to the integral result and determine the exact position.
To take this problem one step further, if we began by knowing only our acceleration over the time period, we must integrate to find the total change in velocity, then add the initial velocity (\(v_0\)), and then we must further integrate to find the change in position, and add the initial position (\(x_0\)).
As you can plainly see, we must have enough information about the system to calculate a usable result, but it is by no means impossible.
Animations of Calculus
A feature of this textbook which may be helpful to your understanding of derivatives, integrals, and their relation to each other is found in an animation in the Appendix section. In this section, a series of illustrations provides a simple form of animation you may “flip” through to view the filling and emptying of a water storage tank, with graphs showing stored volume (\(V\)) and volumetric flow rate (\(Q\)). Since flow rate is the time-derivative of volume (\(Q = {dV \over dt}\)) and volume change is the time-integral of volumetric flow rate (\(\Delta V = \int Q \> dt\)), the animation demonstrates both concepts in action.
