Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
A
can any one help me?
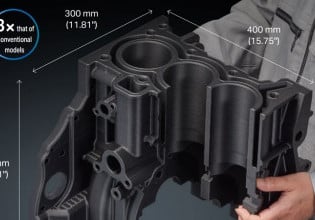
i have stepper motor and it works correctly but when i put the load on it to turn the gears it vibrate and not turn correctly.
i have stepper motor and it works correctly but when i put the load on it to turn the gears it vibrate and not turn correctly.
") ) ..if it doesnt it's just that you either have reached the max step rate or that that specific motor's torque is not high enough for the intended working conditions AT that step rate...Notice that by implementing an acceleration ramp he could have his problem solved without further testing
) ..if it doesnt it's just that you either have reached the max step rate or that that specific motor's torque is not high enough for the intended working conditions AT that step rate...Notice that by implementing an acceleration ramp he could have his problem solved without further testing