 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinA Quadruped Robot That Sees, Decides, and Adapts in Real Time
KAIST researchers have developed a control technology that enables quadruped robots to see terrain, make decisions, and adapt movement in real time, improving performance in complex environments.
Robots have gotten good at moving. The harder problem is knowing how to move before something goes wrong. A research team at the Korea Advanced Institute of Science and Technology (KAIST) is pushing into that gap with a new control system called DreamWaQ++.
DreamWaQ++ builds on KAIST’s earlier work that enabled quadruped robots to walk without relying on vision. That original system, DreamWaQ, used internal sensing, such as joint position and motion data, to estimate terrain. It made the robot stable in low-visibility environments, but it came with a limitation. The robot could only react after its feet made contact with something. DreamWaQ++ changes that.
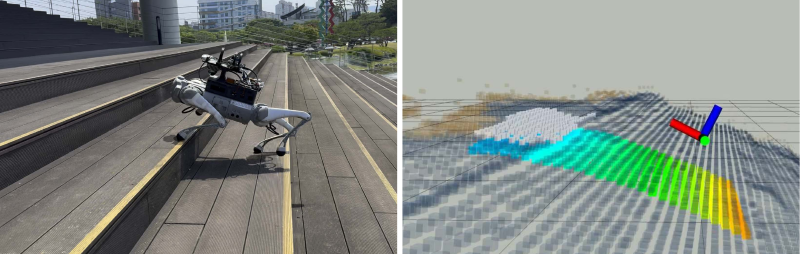
The DreamWaQ++ technology combines visual sensing with internal data to predict terrain and adjust movement before contact. Image used courtesy of GitHub
From Reacting To Anticipating
Instead of relying only on internal sensing, the DreamWaQ++ quadrupedal robot control technology combines internal sensing with cameras and LiDAR. This combination gives the quadruped a way to read the environment before it steps into it.
The difference is small, but it changes how the robot moves. Earlier systems reacted after hitting something. The robot would adjust once it felt the obstacle. With DreamWaQ++, the robot sees what’s ahead and reacts before it gets there. This technology brings the quadruped closer to how animals move. It doesn’t just step and correct. It looks at the terrain, decides what to do, and then moves.
The system uses a multimodal reinforcement learning approach, enabling it to process multiple types of input simultaneously. At the same time, it keeps computation lightweight enough to run in real time. If one sensing method fails or becomes unreliable, the system can fall back on another. This approach helps maintain stability even in uncertain conditions.
During stair-climbing trials, the DreamWaQ++ system navigated a 50-step course in just 35 seconds. Video used courtesy of KAIST Urban Robotics Lab
Testing in Real Conditions
The improvements are clearly evident in testing. In stair climbing trials, the robot completed a 50-step course in 35 seconds. That includes both horizontal and vertical movement, and it outperformed both blind locomotion systems and existing perception-based controllers.
The robot handled slopes up to 35 degrees. That’s much steeper than the 10-degree terrain it trained on. It also shifted its posture as it climbed, taking some load off the rear legs compared to earlier systems. Obstacle handling is where it really stands out. It didn’t follow fixed paths. It picked its own way through based on what it saw, moving through clutter without relying on a separate planning system.
In uncertain terrain, like sudden drops, it showed exploratory behavior. It would stop, assess the area, and then decide how to move forward. That kind of hesitation isn’t a failure. It’s a sign that the system is making decisions rather than just executing movement.
Handling More Than It Was Trained For
One of the more telling results is how the system handles situations it wasn’t specifically trained on. Even though training focused on obstacles around 27 cm, the robot was able to handle steps up to 42 cm with about an 80% success rate. It also cleared obstacles up to 41 cm while carrying a payload.
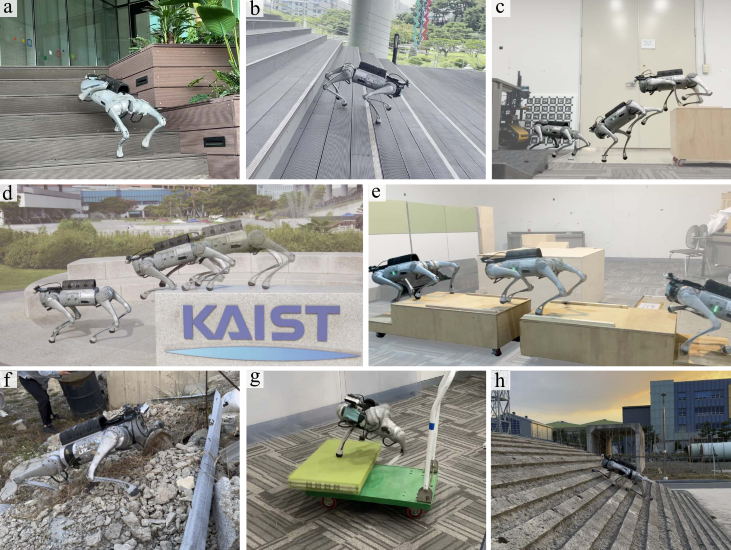
DreamWaQ++ was tested across a range of real-world scenarios, including stairs, uneven terrain, obstacles, and dynamic environments. Image used courtesy of GitHub
That shows the system isn’t just repeating what it learned. It can adjust to new conditions as it goes. In simulation, it went even further. It handled obstacles up to 1 m on one quadruped and 1.5 m on another. That points to something bigger. The control method isn’t tied to a single robot.
Where This Could Be Used
This kind of capability matters most in places where structured movement breaks down. Disaster zones are one example. Visibility is low. Terrain is unpredictable. Robots need to move without relying on perfect conditions. Industrial inspection is another. Facilities often have tight spaces, uneven surfaces, and areas that aren’t designed for wheeled systems. The same applies to forestry and agriculture, where terrain is inconsistent and constantly changing.
A Step Toward More Independent Robots
The shift here isn’t just about better walking. It’s about how robots decide to move. DreamWaQ++ pushes quadruped systems past simple locomotion and into something closer to environmental awareness. The robot doesn’t just respond to the ground beneath it. It interprets what’s ahead and adjusts before problems happen.
That’s a small change in concept. But in real environments, it makes a big difference.












