 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinHaving a Ball: Researchers Develop Robot Hand With Spherical Grasp
Yale University researchers have developed a robot hand that can grasp and rotate objects in a spherical motion, simplifying manipulation in small spaces and unstructured environments.
Professor Aaron Dollar and his research team at Yale University have developed a novel way to perform robotic wrist motion with their “Sphinx” hand. Like a traditional robot wrist and gripper setup, the new robotic Sphinx hand can perform roll, pitch, and yaw movements.
By utilizing spherical rotation,however, these movements are made without excessive arm movements and coding complexity, enabling use in small spaces and unstructured environments. Parasitic arm movements limit space, add complexity to robot programming and teaching routines, and waste energy.
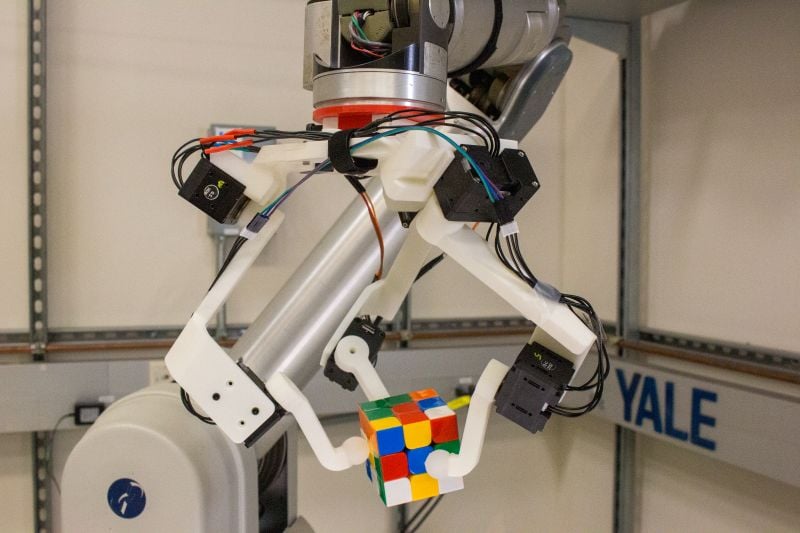
The Sphinx hand can manipulate objects in all three axes: front to back, side to side, and up and down. Image used courtesy of Yale Openhand Project
Robotic Wrist Complexities
Many robotic manipulators model the robot wrist after the human hand. It is a great starting point; model the robot after the human and manual labor it aims to replace. Unfortunately, the human wrist is a complex structure to model.
Loads supported by the wrist are often located a long way from where the load needs to be transported, meaning the entire robotic arm must move in order to manipulate the wrist and align the grippers or fingers. This movement uses additional energy and programming complexity. Both human and current robotic wrists suffer from this problem; some actions require whole arm movements, even when additional torque is unnecessary.
The Sphinx hand can successfully rotate grasped objects in tight spaces. Video used courtesy of Yale Grablab
The Sphinx Hand
Yale University researchers’ Sphinx hand is a spherical robot hand mechanism that can pick up and manipulate objects with all the same three degrees of freedom as a standard robotic wrist. Unlike a traditional wrist, however, the Sphinx hand can grasp and rotate without requiring large, complicated arm movements.
So far, the Sphinx has been run through some physical trials of tasks that are often challenging for robotic manipulators. It has been used to screw in lightbulbs of different sizes in a tight space, simulating a narrow closet. While a human can perform this task easily, programming a traditional arm, wrist, and hand manipulator to do so is challenging. The added flexibility of the Sphinx’s spherical hand mechanism makes this a much simpler task.
The robot hand has also been used to hook a rope and drag it through a small space. This is a task difficult for humans (think of passing a wire through a wall), and extremely difficult for traditional robots.

The Sphinx hand teleoperating (remotely manipulating) a rope. Applications like this would benefit rescue efforts after a disaster or help electricians run wires through walls. Image used courtesy of Yale Openhand Project
These advantages are made possible through the fact that the wrist can be physically closer to the object being manipulated. Vatsal Patel, Ph.D. candidate and first author of Combining Grasping and Rotation With a Spherical Robot Hand Mechanism, highlights these benefits, “It’s more efficient and you don’t need a ton of space. The wrist is able to do these rotations [roll, pitch, yaw] much closer to the object without the burden of moving the whole arm. It works much faster and much more efficiently.
Unstructured and Compact Environments
While the Sphinx hand is still in the research and prototyping stages, Dollar expects it will benefit robotics as a whole. The small footprint required to perform manipulations and rotations makes it ideal for unpredictable and unusual spaces. In particular, disaster relief efforts, industrial troubleshooting and repair, and other unstructured environments can take advantage of the unique properties of the Sphinx manipulator.












