 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinRobotic Hand Features Human-Like Grasp Without Complex Programming
Researchers have developed a robotic hand that features human-like dexterity without the need for complex programming, thanks to the use of compliant materials.
Researchers at the École Polytechnique Fédérale de Lausanne (EPFL) CREATE Lab have developed the adaptive dexterous anthropomorphic programmable stiffness (ADAPT) robotic hand that performs human-like grasps. Through bio-inspired mechanics and the use of compliant materials, the ADAPT hand demonstrated its ability to grip up to 24 different objects, including bananas and bolts, using motions that naturally emerge from its physical design.
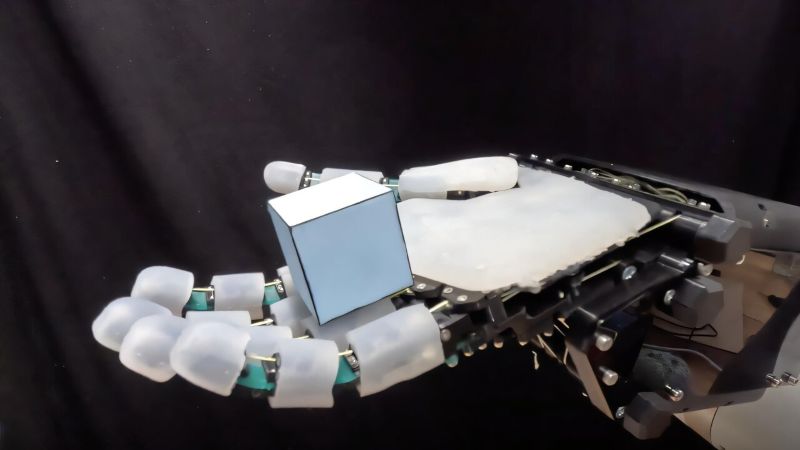
The ADAPT robotic hand mimics a human hand in form and function. Image used courtesy of CREATE Lab EPFL
A Human-Like Robotic Hand
The innovative ADAPT hand features 20 joints, and unlike a conventional robotic hand that requires motor activation for each joint, the new robotic hand is equipped with 12 motors located in the wrist. The hand simplifies control by focusing on four key motion points, allowing it to adjust to various objects and positions with ease. This is made possible with its spring-loaded joints, compliant robot wrist, and soft silicon skin.
The ADAPT robotic hand features compliant materials that enable it to pick up objects like a human hand. Image used courtesy of EPFL School of Engineering
Self-Organizing Grasps Without Complex Code
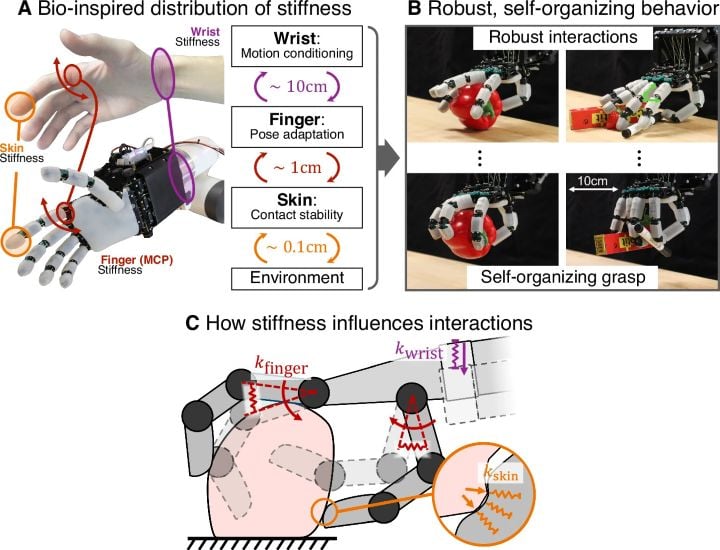
Designed to mimic the mechanical characteristics of a human hand, the ADAPT hand features configurable stiffness in the skin, fingers, and wrist, allowing centimeter-scale adaptive motion and smooth object engagement. The hand employs open-loop control, eliminating the need for feedback from sensors or mapping of the surroundings to function.
The actuation signals are pre-programmed to human-like waypoints that are recorded and replayed and equipped with a custom signal mixer box featuring 12 linear potentiometers that map each actuator's position. In a statement by the lead author and PhD student at EPFL, Kai Junge, the ADAPT hand, like humans, does not need object data to grasp successfully, as it adapts through compliant interactions.
Dexterity Emerges Naturally
Tests conducted by the CREATE Lab engineering team of the ADAPT hand involved picking up objects from a tabletop. Based on the object orientation and size, the hand adjusted the grip style, using a finger grip for smaller items and a power grip for larger ones. Out of 24 items, the hand demonstrated a 68% match in grasps, successfully handling 17 items, and achieved a 93% success rate overall when attempting to grasp them three times with different placements along its path.
The ADAPT robotic hand demonstrated a 93% success rate in grasping 24 different objects, including a bolt. Video used courtesy of EPFL School of Engineering
Bio-Inspired Robotics
According to Junge, the challenge of replicating a robot with human-like functionality is greater than anticipated. To overcome this, researchers are exploring the distributed mechanical intelligence of individual parts, such as joints, muscles, and skin, rather than relying on top-down brain intelligence by employing embedded intelligence in the robot's body using compliant biomimetic mechanics.
The research team, however, plans to enhance the system by reintroducing sensory feedback through pressure sensors and possibly adding artificial intelligence for motion adaption, all while maintaining the mechanical foundation that supports the intelligent behavior of the hand. The ADAPT hand has the potential to accelerate the development of assistive devices and service robots that can seamlessly interact with humans.












