Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinRobot Balance Is on a Roll: Meet BallBot, the Ball-Balancing Robot
BallBot demonstrates the latest research in robot balancing abilities. A robot that moves by balancing on top of a ball can provide new motion solutions, opening up applications across industries.
Researchers at the University of Danang’s University of Science and Technology have developed and refined a ball-mounted robot named BallBot. While more work on the design is expected, their latest findings have been published in the International Journal of Mechanical Systems Dynamics, indicating the promise of this robot’s future in the robotics space.
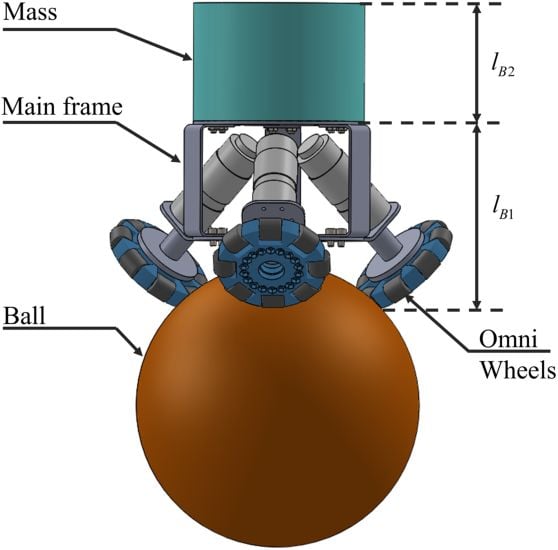
A schematic view of the BallBot, a ball-balancing robot. Image used courtesy of International Journal of Mechanical System Dynamics
BallBot: the Ball-Balancing Robot
More than one senior robotics project has involved an inverted pendulum — balancing a stick standing up straight and moving a platform beneath it to prevent it from falling. In this challenge, typically performed in only one or two dimensions, the stick is tapped, and the platform must respond to the stimulus. BallBot performs these types of calculations, but instead of a platform, there is a large ball that can roll in virtually any direction.
In order to perform this balancing act, BallBot’s control routines leverage multiple different schemes. As the object mounted on top of the BallBot appears to topple, the controller calculates the response and sends the control signals to four wheels that control the motion of the ball. By adjusting the braking and rotation of these wheels, the ball can roll to keep the object balanced on top.
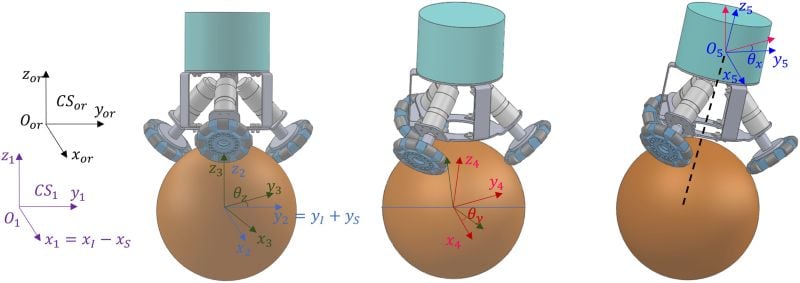
A look at the BallBot coordinate system. Image used courtesy of International Journal of Mechanical System Dynamics
Robot Balance Control
At the heart of the control system is a Linear Quadratic Regulator (LQR). The LQR keeps the mass balanced and allows it to navigate along pre-programmed paths. As far as actual control routines, the LQR implements some proportional derivative (PD) control, fuzzy logic, sliding mode control (SMC), and several others working in unison.
Most of the work on BallBot has been theoretical at this time, but the mathematical models are highlighted in the International Journal of Mechanical Systems Dynamics. Interestingly enough, the size of the ball does not matter nearly as much as the change in carried mass, though the response times can be modeled regardless. Also, the models do not account for elasticity in the ball, increased friction (due to dirt or contaminants), and several other challenges that will need to be solved before the BallBot can be implemented in the real world.
Gizmoduck from Darkwing Duck, the 90’s cartoon. Image used courtesy of Darkwing Duck Wiki
Ball Robot Advantages
At first glance, a robot that moves on a ball seems like a challenge with no purpose. Its design is reminiscent of Darkwing Duck’s friend, Gizmoduck, who rolled around on one wheel. A neat concept, but the worst action figure, as it would obviously fall over.
As it turns out, the flexibility in motion for a ball-driven robot is unmatched. With the proper routines, it could run across a lumpy meadow or along a narrow beam over a work area with equal ease. Interestingly enough, a rolling ball’s path is relatively easy to track, regardless of the terrain. Soccer players do this routinely, and the motions can be easily modeled. The final result is a robot that can move in all directions across varied and unknown terrain.
Robotics on a Roll
Once perfected, the BallBot could be used to move objects in a relatively vibration-free manner, as compared to multiple-wheeled robots. This movement could be useful for serving beverages without spilling them, even at a large outdoor event, such as a wedding. It could also be used in search and rescue operations where a patient’s head and spine must be stabilized and not jarred; a BallBot could provide a safer mechanism for moving a patient than multiple EMTs and a backboard.