 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinIndustrial Network Options: EtherCAT Advantages, Challenges, and Specs
EtherCAT is an often preferred competitor in the arena of industrial networking protocols. Learn the reason why many technologies embrace this protocol and what sets it apart from other fieldbus varieties.
Industrial computer technology requires networking, and this always brings a conflict of utility against simplicity. This is why many competing standards arise, attempting to create a faster, more reliable form of data transmission while maintaining speed and security. One of the communication channels optimizing all of these properties is EtherCAT.
What Is EtherCAT?
EtherCAT is an Ethernet-based fieldbus protocol designed to connect industrial devices at high speed giving rapid communication between the controller and devices like servo drives or drives for motor synchronization. One of its advantages is that it can use Ethernet networks to communicate with industrial devices as close to real-time as reasonably possible.
Real-time means that all the information is delivered without delay and with very low variations in jitter time so that this protocol can ensure constant and high-speed communication. While absolute real-time data is not possible, some protocols will produce a better environment for high-speed responses.
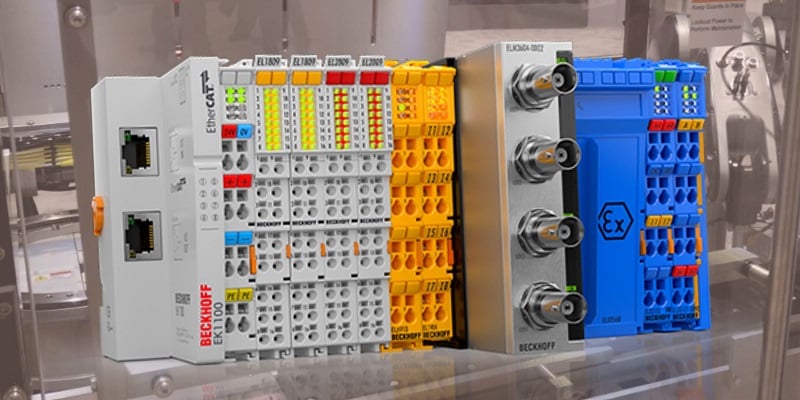
Figure 1. EtherCAT, with faster data and lower data overhead, is a popular choice for the coordinated motion of multiple axes in industrial automation projects.
Due to its characteristics, EtherCAT protocol is often seen in robotic applications, packaging machines, automated assembly machines, safety applications, and others. All of these application examples have a common factor: they require fast communication.
EtherCAT vs Ethernet
EtherCAT is based on the same standard as Ethernet, although 30 years younger. EtherCAT uses IEEE 802.3, which contains all physical and data link standards to communicate all devices in a Local Area Network (LAN), such as an industrial shop floor.
One of the primary disadvantages of the normal Ethernet model on the factory floor is the extra time required to transmit and process the addressing and configuration information necessary for most infrastructure to work. Hardware such as hubs, switches, and routers depend on these extra bytes of configuration information included with every message to route the signals properly.
Analyzing the seven layers of the OSI model, shown below, and comparing EtherCAT with a TCP/IP package, EtherCAT only uses layers 1 and 2 for transmitting its data since, at the industrial network level, data is the most important message component.
7 Layers of the OSI Model
|
Layer 7 |
Application |
|
Layer 6 |
Presentation |
|
Layer 5 |
Session |
|
Layer 4 |
Transport |
|
Layer 3 |
Network |
|
Layer 2 |
Data Link |
|
Layer 1 |
Physical |
EtherCAT and Ethernet Difference in Speed
EtherCAT deviates from a normal Ethernet model due to the reduced payload information sent in a typical Ethernet frame, and layers 3-7 in the OSI model can be removed. This optimization is only possible because of the simplicity of the EtherCAT network. The devices and equipment do not require such information, but this also means that an EtherCAT device may not exist in a typical Ethernet network.
Examine the comparison below of a standard Ethernet frame compared to an EtherCAT frame to illustrate the relative simplicity of EtherCAT.
Ethernet 802.3 Frame
|
Preamble |
Dest Address |
Source Address |
Ethernet Type |
Payload |
Frame Check |
EtherCAT Frame
|
Header |
Data Payload |
More Data Payloads… |
To compare the tables above, a transmission of one double integer (DINT) from one machine to another would be a payload of 4 bytes. In an Ethernet message, this would be expanded to the 46 byte minimum, and the entire frame would be 72 bytes long in order to transmit those 4 bytes of data.
Compare this length to an EtherCAT message of 4 bytes of actual data in one data payload. The total size would now be 18 bytes long—only a quarter of the time taken to send the same data via Ethernet!
Difference Between EtherCAT and Ethernet Frame
In Ethernet, the frame has the information of one device sending data directly to another, or more typically, the same data sent to all the connected devices (multicast or broadcast). In EtherCAT, one frame can send information originating from any device and going to any other device on the network. It can do this because the frame payload has a specific space for each device to write data to send. This is called a 'datagram'. Each datagram has a header with information on what devices can access the data and if it can be written or read only.
The 2-byte 'type' field in the standard Ethernet frame allows an EtherCAT data transmission to be identified with 0x88A4 (2 bytes), causing the sending and receiving devices to recognize the simpler frame. In this way, it is possible to send an EtherCAT message over an Ethernet network, although the advantage of small data sizes would be lost.
The true power of EtherCAT comes at the device level when large amounts of data can be shared at high speeds using standard message formats.

Figure 2. This servo motion drive uses EtherCAT due to its high speed and data volume. COMM connectors visible at the bottom of the module. Image used courtesy of Advanced Motion Controls
By putting multiple devices' information into one frame, the network will have fewer frames passing through to all the devices, reducing delay and jitter. In Ethernet, one frame is sent to each device and must contain more information to reach its destination. The simplicity of EtherCAT also makes the connection reliable. Having more frames in the network can make the jitter higher.
Ethernet communicates with a lot of devices and moves a high volume of information like images, videos, etc. However, EtherCAT connects devices at higher speed with a lower volume of information like 32-bit registers, analog I/Os, digital I/Os, etc. It gives time accuracy with timestamps added. EtherCAT can connect up to 65,535 in one segment, so large network sizes are not a problem.
Network Equipment: Hubs, Switches, and Routers
For EtherCAT, it's not necessary to have a network element like a switch to send data. Every device has two ports to connect to each other, and all devices can forward frames. However, a switch or hub can still be connected to the network if necessary. The network topologies supported by EtherCAT are:
-
Ring
-
Bus
-
Tree
-
Star

Figure 3. Beckhoff, one of the pioneers in EtherCAT technology, has product lines for I/O devices with two EtherCAT ports, shown here as both M8 (left, at the top in green) and RJ45 (right) connectors. Image used courtesy of Beckhoff
With the ring topology, EtherCAT has redundancy and fast recovery from a broken link. This topology means that from the main controller device, each following device has an incoming port as well as an outgoing to the next device. The last device finally has a connection back to the main controller. It's a very simple topology, and this equipment has two ports to create a ring network without needing to add networking equipment that can reduce some costs. If any network cable is broken around the ring, there is still a connection to every device.
EtherCAT Cable and Connectors
As mentioned before, layer 1 of EtherCAT is the same as Ethernet. Due to this, cables and connectors of Ethernet can be used in an EtherCAT network.
It's not usually recommended to use standard cables that are used to connect computers. The physical scenario differs for EtherCAT because this protocol is for industrial applications. One important factor is electromagnetic noise. Industrial Ethernet cables have conductive shields to prevent electromagnetic induction to the cable.
Because EtherCAT has the same physical layer as Ethernet, depending on the equipment specs, we can use twisted-pair or optical fiber to connect the devices and different category cables of Ethernet depending on the communication speed. This means it can send information at speeds of 10 Mbps, 100 Mbps, or 1 Gbps, depending on the characteristics of the equipment's Ethernet port and cable category.












