Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinDear All
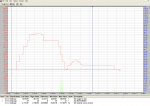
We have GE Frame 6B Gas turbines and we are facing IGV Sticking issues while changing loads. The IGV actuator is stucking at different openings between 42 to 55 degrees intermittently.
Surprisingly, whenever we shutdown turbine and calibrate the IGV system using Mark VI, the calibration becomes successful. Even we have changed the servo valve, but the problem remains the same.
We know that the oil we are using is having a lot of varnish MPC inside it. But my question here is that if there is varnish contributing to this problem, then how it passes the calibration. It always stucks when the turbine is running.
Thanks
Regards
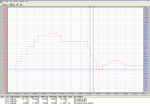
We have GE Frame 6B Gas turbines and we are facing IGV Sticking issues while changing loads. The IGV actuator is stucking at different openings between 42 to 55 degrees intermittently.
Surprisingly, whenever we shutdown turbine and calibrate the IGV system using Mark VI, the calibration becomes successful. Even we have changed the servo valve, but the problem remains the same.
We know that the oil we are using is having a lot of varnish MPC inside it. But my question here is that if there is varnish contributing to this problem, then how it passes the calibration. It always stucks when the turbine is running.
Thanks
Regards