Ctoren I gues that the formula is not well displayed/written, Would you tell us if that is for first/second order Filter, or anything else?
Looks like it is a formula for Transfer function onf a harmonics filter...
We must know what is equal to the formula ?
There are some various methods to calculate Tau ,poles , Ts , FFT and other spectrum , amplitude /phase analysis in signal treatment world .
It looks like ctoren is trying to find the dead time for a transfer function. There is no equal sign in this case.
Dead times are determined empirically.
It looks like ctoren is trying to find the dead time for a transfer function. There is no equal sign in this case.
Dead times are determined empirically.
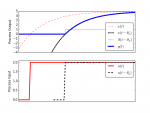
Time delay is a shift in the effect of an input on an output dynamic response. A first-order linear system with time delay is:
τpdy(t)dt=−y(t)+Kpu(t−θp)
Looks like there an equality somewhere , even it is empirically determined.
There are some interesting article on Time delay for transfer function,
Do not hesitate to tell us more on what you are searching , calculating , simulating....
There is a python or Matlab simulink code programm for simulating time delay and others calculations/determination ..
Time delay is a shift in the effect of an input on an output dynamic response. A first-order linear system with time delay is:
τpdy(t)dt=−y(t)+Kpu(t−θp)
has variables y(t) and u(t) and three unknown parameters with
Kp=Processgain
τp=Processtimeconstant
θp=Processdeadtime
The time delay θp
is expressed as a time shift in the input variable u(t).
u(t−θp)
y(t<θp)=y(0)
y(t≥θp)=(e−(t−θp)/τp)y(0)+(1−e−(t−θp)/τp)KpΔu
For a step change Δu
, the analytical solution for a first-order linear system without time delay (x(t) = y(t) with θp=0
)
τpdx(t)dt=−y(t)+Kpu(t)
is
x(t)=Kp(1−exp(−tτp))Δu
With dead-time, the solution becomes:
y(t)=x(t−θp)S(t−θp)
=Kp(1−exp(t−θpτp))ΔuS(t−θp)
where
S(t−θp)
is a step function that changes from zero to one at t=θp
Analytic Solution Derivation with Laplace Transforms
I'm designing a cruise control system. I set the process value as 1 / (ms + b) = 1 / (980s + 40). Can I get it as
m = τp? would it be true that way? And I want to add the slope resistance of the ramp as an interference input. How can I do the laplace transform of (mgsin (theta))?
I'm designing a cruise control system. I set the process value as 1 / (ms + b) = 1 / (980s + 40). Can I get it as
m = τp? would it be true that way? And I want to add the slope resistance of the ramp as an interference input. How can I do the laplace transform of (mgsin (theta))?
Last week ctoren was trying to control room temperature with a fan and using feed forwards. Now it is cruise control.
What happened to the dead time? How was it determined that m=980 and b=40? This looks like a problem out of a book but he is trying to figure out how things change as the inclination of the road changes. The short answers is that the transfer function changes. Usually it is the gain that changes. Where is the gain term in the transfer function?
I have no knowledge of either control or laplace transformations. I cannot get help from my advisor.
Although I do not know the language, I search from books and try to design the system. My English is not good enough.
I asked earlier and asked how I can control the temperature and get the 's' domain, and I didn't have enough information. That's why I changed the system I was going to model and decided to design a cruise control system. Because in past topics , "I havent got any information about control". I mentioned this in the topics I opened.
I did not ask you to design or infer an existing system. As a person who has no knowledge of control and automation, I just wanted to learn how I can do it and the logic of the system. And I mentioned this in every post I uploaded. But you ask where is this value and where is this value, and I don't know what those values you ask mean. If I had an idea about the things you said and if I could give values, I would have stated them in my questions. But as I've said many times, I don't know control and I want to learn. Because I have homework and I have two days left. If I can't, I will be both a waiter and a student for another year, like I do to survive now .
So It was enough to just say the logic. I do not want to be disrespectful and I apologize for asking.
I took the vehicle's saturation speed 40 kmh and fixed the value of b .v = 40 kmh) Interpreting the graph and multiplying the value b by b = [(friction coefficient) * (mass) * (g)] / v ^ 2 and the transfer coefficient you said 0.02 / (20s + 1 ) I got the equation. I am just learning the control and I found it by trying these formulas. I asked if I can do Tp = m in the solution method you sent.
I have no knowledge of either control or laplace transformations. I cannot get help from my advisor.
Although I do not know the language, I search from books and try to design the system. My English is not good enough.
I asked earlier and asked how I can control the temperature and get the 's' domain, and I didn't have enough information. That's why I changed the system I was going to model and decided to design a cruise control system. Because in past topics , "I havent got any information about control". I mentioned this in the topics I opened.
I did not ask you to design or infer an existing system. As a person who has no knowledge of control and automation, I just wanted to learn how I can do it and the logic of the system. And I mentioned this in every post I uploaded. But you ask where is this value and where is this value, and I don't know what those values you ask mean. If I had an idea about the things you said and if I could give values, I would have stated them in my questions. But as I've said many times, I don't know control and I want to learn. Because I have homework and I have two days left. If I can't, I will be both a waiter and a student for another year, like I do to survive now .
So It was enough to just say the logic. I do not want to be disrespectful and I apologize for asking.
I took the vehicle's saturation speed 40 kmh and fixed the value of b .v = 40 kmh) Interpreting the graph and multiplying the value b by b = [(friction coefficient) * (mass) * (g)] / v ^ 2 and the transfer coefficient you said 0.02 / (20s + 1 ) I got the equation. I am just learning the control and I found it by trying these formulas. I asked if I can do Tp = m in the solution method you sent.
I used this equation for the process ;
m (dv / dt) + bv = u
msv (s) + bv (s) = u(s)
and for disturbances ;
Fs + Fg + m(dv/dt) = u(s)
Questions I Want to Ask;
1-) How can I add forces mgsin (angle of slope) = Fg and mg (coefficient of friction) (cos (angle of slope)) = Fs into this equation of speed and how I can transform this equation to Laplace equations ? And how this equations I convert to this into a FOPDT form?
2-) I found it with the formula b = [mg (friction coefficient)] / v ^ 2. Assuming the saturation speed as 40 kmh, I found the coefficient b accordingly. Is this formula correct?
3-) How can I convert the equation (1 / (ms + b)) to this into a FOPDT form?
I used this equation for the process ;
m (dv / dt) + bv = u
msv (s) + bv (s) = u(s)
and for disturbances ;
Fs + Fg + m(dv/dt) = u(s)
Questions I Want to Ask;
1-) How can I add forces mgsin (angle of slope) = Fg and mg (coefficient of friction) (cos (angle of slope)) = Fs into this equation of speed and how I can transform this equation to Laplace equations ? And how this equations I convert to this into a FOPDT form?
2-) I found it with the formula b = [mg (friction coefficient)] / v ^ 2. Assuming the saturation speed as 40 kmh, I found the coefficient b accordingly. Is this formula correct?
3-) How can I convert the equation (1 / (ms + b)) to this into a FOPDT form?
I wanted to design a simple feed forward control system where I could only control the speed. I could have designed a more detailed system, but I don't have enough time. So I just want to control the speed. Wheel torque, inertia, and air resistance can be neglected. As Disturbances I just thought of the slope of the road and the friction force. I don't know what Throttle means and the systems I researched also had this word. I guess there is no exact equivalent in my language. In the books I have reviewed, I haven't come across a model that I can design a static and dynamic feedforward controller. For this reason, I could not convert the values to FOPDT form and calculate the dead time and time constant. I would be glad if you could tell me if there is anything missing or need to add. Thank you for your help.
If I can determine Gp and Gd , I can design this system.
I wanted to design a simple feed forward control system where I could only control the speed. I could have designed a more detailed system, but I don't have enough time. So I just want to control the speed. Wheel torque, inertia, and air resistance can be neglected. As Disturbances I just thought of the slope of the road and the friction force. I don't know what Throttle means and the systems I researched also had this word. I guess there is no exact equivalent in my language. In the books I have reviewed, I haven't come across a model that I can design a static and dynamic feedforward controller. For this reason, I could not convert the values to FOPDT form and calculate the dead time and time constant. I would be glad if you could tell me if there is anything missing or need to add. Thank you for your help.
If I can determine Gp and Gd , I can design this system.
I have reviewed this text before. Used 2 inputs .I understood the velocity equation, but I could not understand how he calculated the forces. How did he get the signed equations? Can you explain?
I have reviewed this text before. Used 2 inputs .I understood the velocity equation, but I could not understand how he calculated the forces. How did he get the signed equations? Can you explain?
Where do the values for m and b come from?
The problem I have with most control books and professors is they have no idea what reality is like.
In real life you aren't given a transfer function. In 35+ years of control I have never seen a system with a documented transfer function. The values of the transfer function must be determine empirically. This requires doing system identification. This is the first thing that should be taught in every controls class. I have two videos on system identification. One is a simple one similar to your problem.
I have a more advanced version
Once you have the open loop transfer function it is easy to place the poles to get the desired response. Then one calculates the controller parameters to achieve desired pole locations.
BTW, feed forward gains are calculated using the inverse of the open loop transfer function so it is important to know what the open loop transfer function is.
I think this education system is a mistake. Just like my graduation depends on homework in a course I don't know or take. Thanks for videos pnatchwey. I will watch the videos and correct my mistakes.
 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin