 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinResearchers Play With Fidget Poppers To Advance Soft Robotics
Purdue University researchers have found inspiration in a common child’s toy: fidget poppers. The toy’s bistable actuation has been applied to robot grippers and legs for use in challenging environments.
Researchers at Purdue University have developed a new set of soft robotic grippers and legs inspired by fidget popper toys. Andres Arietta, a mechanical engineering professor at Purdue, and his research group have been studying how bistability can make everything from shape-shifting furniture to aircraft wings that morph in flight. Bistability, or the ability to bounce between two states, enables fidget poppers to move from one position to another. Recently, the team has been studying the actuation of these bistable poppers to create robotic grippers and to inch robotic legs forward.
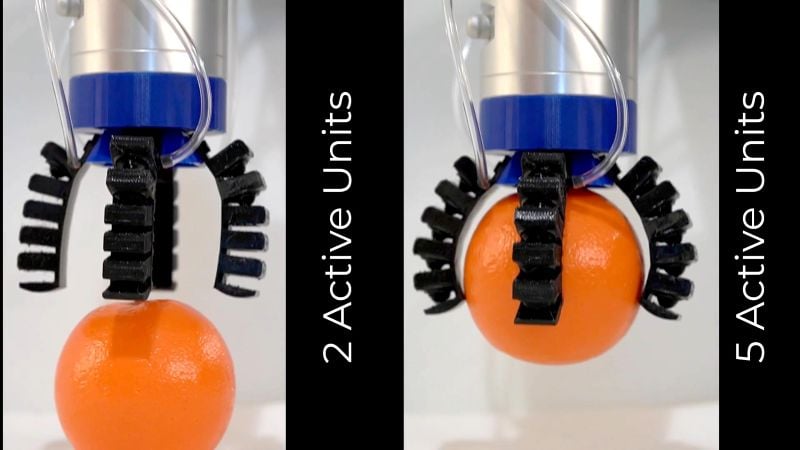
Bistable poppers forming a gripper. Notice as the number of “popped” poppers increases, the stronger the grip. Image used courtesy of Purdue University Mechanical Engineering
Bistable Binary in Fidget Poppers
Bistable pop fidgets switch between two set states, based on a small force. As a toy, a child pushes the round dome, and the popper quickly flops to the other side, transforming from a convex surface to a concave one. If the child pushes on the other side, it flips back to its original state. Because there are only two states (convex or concave, from one point of view), it can be described by a binary 0 or 1. Small arrays of these bistable poppers can represent larger binary numbers.
The concept of bistability is found throughout nature. Certain insects can quickly deploy wings, and Venus flytraps close their traps on their prey based on bistability.
Bistable actuation eliminates the need for electronics, opening up possibilities for robots to be used in extreme environments, such as in space or the ocean. Video used courtesy of Purdue University Mechanical Engineering
Purdue’s Fidget-Controlled Robots
The Purdue University research team has applied the logic of bistability to a soft robot gripper and robot legs. Without the packaging, the popper deforms slightly, meaning a line of poppers will change shape. If stacked all in one state, the grip will turn inwards, providing a gripping surface. If they are popped and unpopped in sequence, this could advance a robotic leg a little at a time.
Off-the-shelf fidget poppers may have been the inspiration, but the team at Purdue 3D prints its own custom poppers. These custom poppers provide design flexibility and allow the researchers to run channels and fittings for the pneumatic actuation system used to pop the poppers. While using compressed air to actuate the poppers may not be as satisfying to the bored student, it allows researchers to program which pieces are popped at any given time.
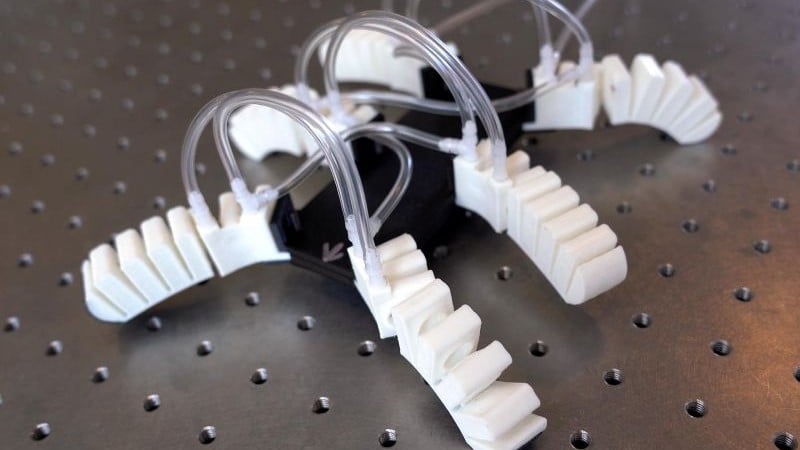
Walking robot made with pneumatically-actuated fidget popper legs. Image used courtesy of Purdue University Mechanical Engineering
Extreme Environments…and Beyond
Design and potential applications can be driven in one of two ways: either the application exists and engineers develop a solution, or a new property, process, or device is developed, opening the possibility for new applications. The robotic gripper made at Purdue falls strongly in the second category; now that it exists, there will be applications where this is the correct solution to the problem. There are many applications where a soft, resilient gripper that can be easily actuated would find use, such as in extreme environments like in nuclear reactors or space.












