 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinThe Rise of AI-Powered Humanoid Robots in Industry
Learn how AI, machine vision, and sensor breakthroughs are driving humanoid robots from sci-fi dreams to industrial realities.
In this article, we will delve into the history of humanoid robotics, traversing literature and physical inventions. Where did the word robot come from? What did early humanoid robots look like and how did they function? This article will answer these questions and survey some of the latest industry and institutional collaborations paving the way for future-proof, artificially-intelligent, agile, cybersecure, and responsive humanoid robotics systems.

Figure 1. Humanoid robotics technologies are becoming faster, more perceptive, and agile thanks to leaps in natural language processing, AI, machine vision, and innovative hardware. Image used courtesy of Boston Dynamics
“Innovation Headwind”
The digital age has fostered innovation across manufacturing, healthcare, automotive, energy, and other worldwide industries. Relatively recent selective pressures, such as the coronavirus pandemic, Brexit, and the war in Ukraine, have forced innovation and turned the attention of governments worldwide to weaknesses in societal infrastructure. The so-called “innovation headwind” attributed to Brexit can be broadly applied to the aforementioned historical events. It encompasses the birth of innovative technologies and systems hoped to help nations from across the globe adapt, survive, and thrive.
This digital age is characterized by the availability of vast swathes of data, with innovative computer systems, sophisticated data communication protocols and hardware systems, advanced processors, and sensor technologies that make gathering data faster, more secure, and efficient. Now, this is where powerful computer algorithms—the building blocks of AI systems—come into play. Machine learning algorithms can analyze large and multi-layered datasets, discern patterns, learn, and optimize their analytical and interpretive capacities. Some neural network-type algorithms mimic the cells of the human brain, piecing together information, promoting AI-based image and speech recognition.
In an industrial setting, an AI model may analyze thousands of sensor measurements, carrying out essential equipment monitoring. The model might use this data to identify trends that typically result in overheating and anticipate issues before the temperature reaches 100.
In this article, we’ll explore humanoid robotics, where advanced control, real-time AI, and adaptive hardware combine to produce mobile, dextrous, adaptive, and responsive human-like technologies. But before that, let’s look briefly at the history of humanoid robots.
Where Does the Word Robot Come From?
According to a collection of sources, including Universal Robots, the popular and widely used word "robot" originates from "robota," Czech for forced/statute labor. The word itself was popularized through its exposure in Czech author Karel Čapek ground-breaking and influential play, "R.U.R." (Rossum's Universal Robots, 1920). This play scrutinizes industrialization and the devaluation of human labor, something that manufacturing companies are conscious of today, employing robots to augment human tasks, reduce heavy and hazardous workloads (including injurious repetitive tasks), and allow human workers to learn new skills and work alongside robotics technologies in harmony.
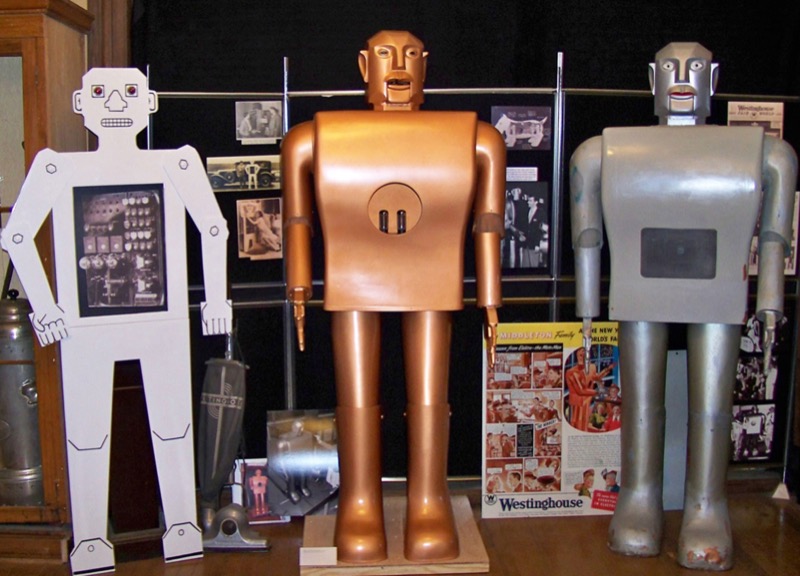
Figure 2. A full-scale model of both Herbert Televox and Elektro and the original Elektro. Image used courtesy of The Mansfield Memorial Museum
Roy Wensley, an engineer at Westinghouse Electric and Manufacturing Co., built the first known humanoid robot, Herbert Televox. The robot was not automated and relied on human input to receive and answer a telephone call, and turn on and off household appliances. Then came other humanoids designed with simple functions such as sitting and standing and altering facial expressions, such as Japanese biologist Makoto Nishimura’s “Gakutensoku” (which emerged in the late 1920s).
Elektro was one of the more famous humanoid robots during the 1930s, another creation from Westinghouse. The bot featured photoelectric “vision” (that allowed it to detect green and red light), a body with a steel gear, and a cam and motor skeleton.
Even before the emergence of robotics through science fiction and eventual, embryonic physical forms, Leonardo da Vinci sketched a design of a mechanical knight with a basic, yet intricate system of pulleys, gears, and cables. This would have been the world's first humanoid robot if Leonardo had made his knight come alive as a physical invention. Though sources say that Leonardo did so, this cannot be confirmed.
The various manifestations of the concept and form of robots have evolved since the Renaissance and the 1930s, with literature and cinema yielding fascinating and unforgettable characters, from Star Wars’ C-3PO, the Bicentennial Man, I, Robot’s Sonny, to cyborg-like characters such as Alita: Battle Angel. Industrial businesses and research institutions have achieved significant milestones in developing physically agile and intelligent systems with human-like perception and mobility. Let’s look at some of the latest and most innovative humanoid robots and their continued development.
Today’s Cutting-Edge Humanoid Robots
Boston Dynamics and Toyota Research Institute are breaking new ground in developing end-to-end language-conditioned policies to support the dynamic humanoid robot, Atlas, in completing long-horizon manipulation tasks.
Atlas is one of the world’s most innovative, adaptive, and agile humanoids, with the ability to run and jump, pick and place parts into specific areas, modify working environments to execute tasks efficiently, and respond to natural language prompts in real-time.
While Boston Dynamics provides Atlas' sophisticated control systems and virtual reality-based teleoperation, Toyota lends its experience with Large Behaviour Models, AI systems that learn from real-life demonstrations. Together, they are developing a framework that enables Atlas to understand complete language-conditioned policies, allowing the bot to interpret natural spoken cues and convert them straight into intricate, coordinated behaviors, rather than performing pre-programmed motions.
Figure 3. An overview of the upgraded pick and place capabilities of BD’s Atlas robot. Video used courtesy of Boston Dynamics
The three main components of these language-conditioned policies are language prompts, proprioception (the robot's awareness of its physical form in space), and vision. The bots process information about their surroundings in as little as 30 Hz (or 30 times per second) to control motion and complex movements. The framework operates via a diffusion transformer model, which permits adaptable, unspecialized behaviour.
As a result, Atlas can handle long-duration, repetitive, sequential operations such as object retrieval, folding, grouping, and placement—and it can adjust without further code when errors occur. The research lays the groundwork for humanoids that can learn nearly every skill from demonstration by combining TRI's extensible AI models with BD's hardware and control software, making "generalist" robots far more useful.
Together, Infineon Technologies and NVIDIA are pushing the boundaries of the capabilities of humanoid robotics by fusing NVIDIA's Jetson Thor AI platform with Infineon’s established portfolio of control and sensor systems, along with gallium-nitride transistors (a wide-band gap technology) and gate drivers designed to improve energy efficiency and power management of humanoid bot motors and onboard systems.
The collaboration will see NVIDIA's AI-backed modules integrate with Infineon's PSOC and AURIX microcontrollers. These microcontrollers have security features to prevent cyber attacks and are renowned for their real-time processing, which promotes rapid decision-making for bots undertaking time-sensitive tasks. Another key aspect of the PSOC microcontrollers is the capacity to utilize field-oriented control (FOC) blocks as part of the ModusToolbox software development system. FOC algorithms stabilize torque output, reduce vibrations and noise, and aid precise movement and energy conservation in humanoid systems.
Humanoid robotics is an area of deep intrigue and contention, with more research and development needed to fine-tune responsiveness to human speech, unpredictable changes to assigned tasks, enhance perception, safety, speed, and agility.
Related Content












