 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinGripping News: Robotiq Adds the Sense of Touch
Robotiq introduces the TSF-85 tactile finger kit, adding pressure and vibration sensing to improve robotic grip consistency and pick reliability.
Robotiq, the Canadian manufacturer dedicated to end-of-arm tooling for robotics, just announced the TSF-85, a tactile finger kit that upgrades the sensing perception of ordinary robotic operations. This enhanced data-collection sensor can provide both pressure and vibration data with a resolution surpassing that of ordinary gripper feedback. This product intends to provide a new channel for data input to improve physical AI, where each pick can be analyzed to optimize future operations.
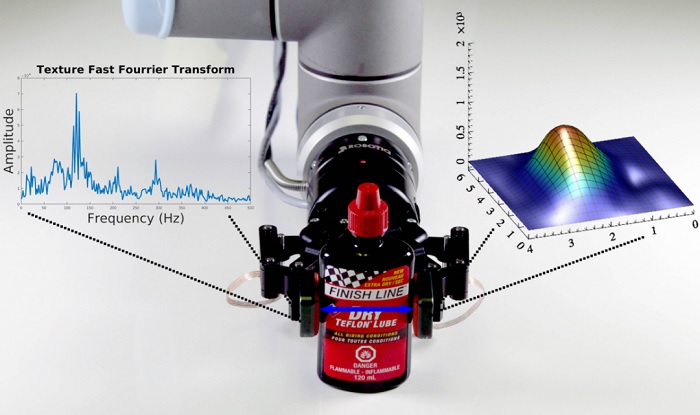
Robotiq’s new TSF-85 sensing fingers provide pressure and vibration data for gripping.
How is Gripper Data Usually Collected?
Gripper feedback is not a new concept. Most grippers are powered either by electricity or pressurized air. For electric grippers, the control system can monitor position sensors and motor current to assess the gripper's status. In pneumatic controls, position and pressure sensors can relay similar data.
With basic positional feedback, simple questions can be answered. Did the gripper receive the command to open/close? Did it successfully grip the part? This feedback is all that is required for most operations.
To really build a successful solution, we may need to consider more difficult questions. Is the part gripped the same way each time? Does the part have identifying holes or protrusions? Is it centered in the gripper? When we know the answers to these questions, we can begin to improve the process over time. Grips become more consistent and reliable, cycle speeds are lowered, and more variability is tolerated throughout the system.
The New TSF-85 Tactile Fingers
Robotiq has launched a complete solution wrapped into an efficient footprint. A 4x7 grid of pressure sensors provides a ‘feeling’ much like a pressure-sensitive touch screen. A soft neoprene coating adds flexibility but is also durable enough to grip virtually every part that was previously handled. The max force is 225 N.
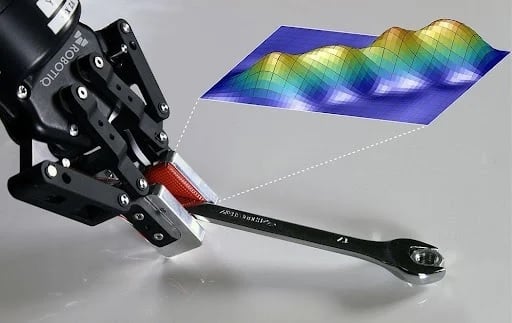
The grip profile can be used to make more accurate motions.
The software development kit (SDK) can provide visual graphs of the gripping profiles. Let’s explore a few cases where this can be insightful.
Effect of Speed on Grip Position
During the test phase, the robot moves at a slow velocity as the part is approached and the gripper closes. The programmer tests the path repeatedly, and it seems reliable. As speed increases, the grip position changes. The only solution is to slow the robot down, or even have it stop while the gripper closes.
If a sensor can detect the exact position of the grip, the robot can compensate for subtle speed changes.
Part Orientation
Imagine gripping a cube with a hole passing through the middle. If only position detection is available, the robot would have no way to tell whether it was gripping a face with or without a hole. But when a 2D profile of the grip is available, the robot can detect the features, position, and orientation of the cube in the fingers, allowing far more accurate placement.
Integration Into Projects
As of now, the data from the TSF-85 does not directly feed into the control system of any robot, but projects are developing rapidly as the user base grows. Currently, the passes pressure, vibration, and orientation data to a PC via USB for graphic visualization and analysis.
As the need for more data grows, the problem is not the sensors themselves. The challenge is knowing how to integrate those sensors into the right packages to collect the information without affecting the process, and finally, how to use the data to analyze KPIs and improve processes over time.












