 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinResearchers Unveil Robotic Gripper for Grasping Multiple Objects
Seoul National University researchers have developed a multi-object grasping robotic gripper, MOGrip. The gripper is modeled after the structure and function of a human hand, enabling it to pick and place multiple objects.
A group of researchers from Seoul National University (SNU) College of Engineering have used the natural gripping positions of the human hand as inspiration for a robotic gripper that can grasp multiple objects at once. This article will provide an overview of the mechanics of the technology, its efficiency compared to single-object robotic hand manipulation, and its potential applications in logistics and manufacturing industries.
SNU’s research team developed the MOGrip as a more efficient alternative to single-object robotic gripping. Image used courtesy of Seoul National University
The Multi-Object Gripper (MOGrip)
The idea behind MOGrip’s development arose in 2019 after researchers watched human factory workers pick up and grasp multiple objects to increase the efficiency of pick-and-place operations. The field of robotic object manipulation has seen the birth of multi-object grasping robotic end effectors with various small form factor grippers arranged together at the end of a robot arm. This can limit their use to highly structured environments.
In particular, the researchers were interested in how human workers store and grasp objects and place them via finger-to-palm and palm-to-finger translation.
An overview of the structure and function of the MOGrip robotic hand. Video used courtesy of SNU BioRobotics Lab
MOGrip features a four-fingered design for stable translation and a grasping palm made up of two conveyor belts with elastomeric filaments attached to them. These filaments/hairs work alongside a series of elastic tendons, allowing the hand to pick up and translate objects to the inner palm, storing multiple objects simultaneously. Two decoupling links were added to divide the translating and grasping motions for more streamlined control.
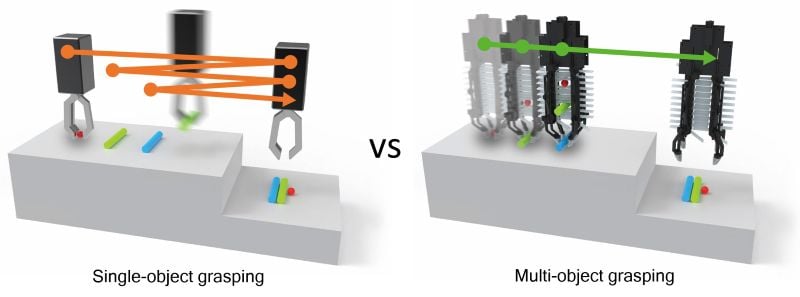
Multiple-object handling saves on robot travel and process time, enhancing pick-and-place process efficiency. Image used courtesy of Seoul National University
Multi-Object Grasping
The researchers tested and evaluated their multi-object gripper in a lab-scale logistics setting, comparing its process time and travel distance to the path of a single-object gripper. With its multiple-object gripping capacity, the MOGrip, compared to the single-object manipulator, reduced process time by 24% and travel distance by 72%. When trialed in a home setting, MOGrip was able to carefully pick and store multiple objects and then place them in specified locations.
The MOGrip is developed with the principles of human multi-object manipulation in mind. Translating objects finger-to-palm and palm-to-finger adds an extra level of dexterity that enables robots to pick objects or parts of different sizes and shapes for placement into containers or arranging on a specified surface. The general structure used to grasp objects also removes the problem of adding and removing robot end effectors for specific part picking, which saves valuable pick-and-place operational cycle times.
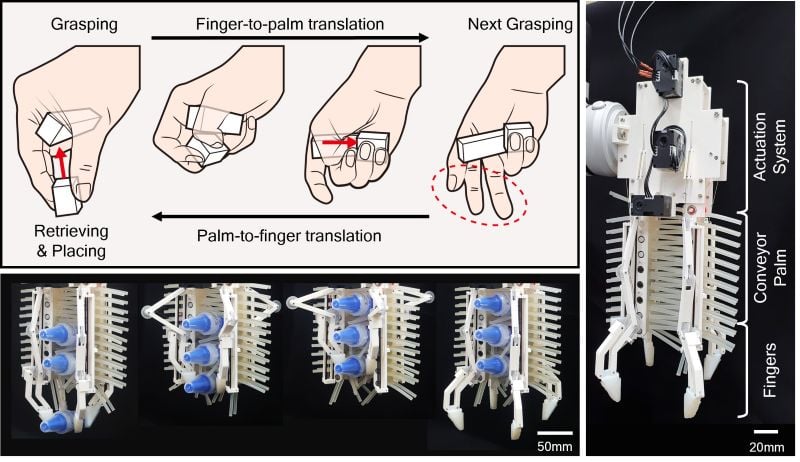
The MOGrip is modeled on the mechanical manipulations of the human hand when picking up and setting down multiple objects at once. Image used courtesy of Seoul National University
Pick-and-Place and Beyond
By facilitating the precise and quick positioning of parts or supplies, MOGrip has the opportunity to improve assembly line operations and increase productivity. Robots using MOGrip may perform unstructured jobs with flexibility and agility by integrating these advanced manipulation capacities, which can result in significant cost savings and enhanced industrial efficiency.
While still in research and development, MOGrip is being designed to provide greater efficiency when manipulating objects for robots working in home, logistics, and other commercial and industrial environments.












