 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinRobotic Grippers Gain a Smarter Grasp of Production
Designed for industrial robotics, the Camozzi Series CSPT combines intelligent gripping with integrated sensing and process monitoring.
For years, grippers have largely been viewed as the final link in an automation system. Their job was simple: grab a part, move it, and release it. As collaborative robotics becomes more common, that role is starting to change. Camozzi’s new Series CSPT collaborative gripper is built around that shift. Instead of acting solely as a mechanical tool, it combines gripping, sensing, monitoring, and data collection into a single package. The result is a device that not only handles workpieces but also provides information about what is happening during the process.

A smart collaborative gripper that combines integrated sensing, force monitoring, and real-time data collection to improve robotic handling accuracy and process control. Image used courtesy of Camozzi
More Than a Standard Gripper
At its core, the Series CSPT is a self-centering parallel gripper designed for collaborative robots. It features a T-guide construction, double-acting operation, and a 40 mm stroke per jaw. The gripper delivers up to 150 N of gripping force per jaw at 6 bar while maintaining a repeatability of 0.05 mm when holding a part. Those specifications alone make it suitable for many assembly and handling tasks. What separates it from more conventional designs is what has been built around the gripping mechanism.
The Series CSPT integrates valves, sensors, and an absolute encoder directly into the unit. Instead of relying on external hardware to gather information about the gripping process, the gripper can monitor force and position on its own. This allows it to provide real-time feedback while work is being performed.
Turning Motion Into Data
One of the biggest changes in industrial automation is the expectation that devices contribute data, not just movement. The Series CSPT continuously collects and transmits information about its operating state. Force and position can be monitored throughout the gripping cycle, giving operators a clearer picture of what is happening at the point of contact between the robot and the workpiece.
That visibility opens the door to functions that would otherwise require additional sensors or separate inspection systems. The gripper can automatically measure workpieces, detect whether a part is present, and identify changes that might indicate an issue. It also includes an anti-slip gripping function designed to help maintain control during handling.
Designed for Collaborative Automation
Collaborative robotics has introduced different requirements than traditional industrial automation. Systems need to be flexible, adaptable, and capable of working with a wider net of products and processes.
The long stroke of the Series CSPT allows it to handle workpieces of varying sizes without requiring frequent tool changes. Despite integrating valves, sensors, and an absolute encoder, the gripper only weighs 1.6 kg, making it suitable for collaborative robotic applications where payload capacity remains an important consideration. That flexibility becomes particularly useful in environments where product dimensions vary from one cycle to the next.
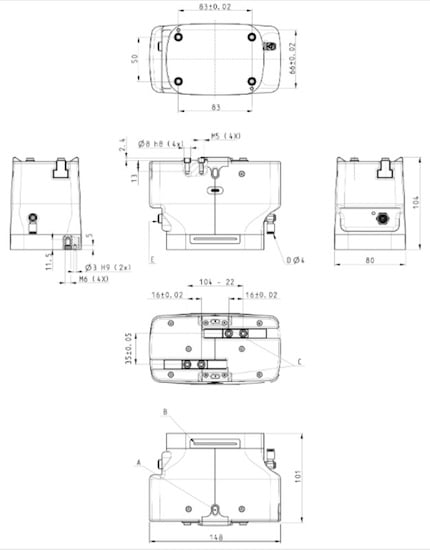
Engineering drawing of the Series CSPT collaborative gripper showing overall dimensions, mounting points, and mechanical layout for system integration. Image used courtesy of Camozzi
The platform also includes gesture recognition and position-monitoring capabilities that support more interactive and adaptive workflows. Rather than executing the same motion repeatedly, the system can respond to changing conditions. This makes the gripper particularly well suited for collaborative robotic systems where precision and adaptability are both important.
Reducing Complexity at the End Effector
Adding sensing capabilities traditionally meant adding more hardware. Extra sensors, wiring, mounting brackets, and communication interfaces all increase complexity. The Series CSPT reduces the amount of external equipment needed around the end effector by integrating these functions directly into the gripper. That can simplify installation while making system design cleaner and easier to manage. The approach also supports faster deployment. Engineers spend less time integrating separate devices and more time focusing on the application itself.
The Future of Intelligent Gripping
The Series CSPT is aimed at applications where handling and process visibility are equally important. Assembly operations, robotic workcells, and end-of-line packaging systems are obvious examples.
As automation systems continue to become more data-driven, devices like the CSPT represent a broader trend. The gripper is no longer just the component that picks up a part. It is becoming a source of information that helps optimize the entire process.
Related Content












