 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinGuide to Robotic Grippers: From Delicate to Heavy-Duty Handling
Selecting the right robotic gripper is key to performance. Discover gripping solutions for delicate parts, soft foods, and industrial payloads.
Let’s explore advanced gripping technologies that support applications across medical, electronics, pharmaceutical, and cleanroom environments, which require a high level of hygiene (to reduce contamination), precision, and delicate handling of materials/parts.
Suction and Adhesive Grippers
SCHUNK's ADHESO gripping technology features an innovative nature-inspired structural design based on gecko toe-pads. Like the gecko toe pads, the ADHESO grippers use Van der Waals forces to adhere to different materials and surfaces. Analogous to the specialized setae (minuscule, cylindrical biological structures) of the gecko, SCHUNK’s ADHESO grippers employ unique polymers that form finely structured legs. Van der Waals forces (namely London Dispersion Forces) are created between the surface/material and the polymer legs when they come into contact. These weak, momentary molecular attractions do not depend on polarity to exert an effect and work on almost any smooth surface, producing a powerful, residue-free grip optimal for handling delicate parts.

Figure 1. SCHUNK’s ADHESO gripper uses Van der Waals forces to adhere to surfaces and can release via rotary, sliding, tilting movements, and pressing. Image used courtesy of SCHUNK
SMC's ZNC Series Bernoulli Gripper uses air cushions–blowing air rather than using a vacuum–to create suction. This non-contact method of gripping is ideally suited to the delicate handling of fragile objects/materials such as blister packs, circuit boards, cloth, films, silicon wafers, and bubble wrap. The Bernoulli gripper incorporates a specialised cover to reduce vibration and multiple ports for using a release port or incorporating a pressure sensor.
Another adaptable, flexible gripper technology for gently handling parts is the Festo DHAS Adaptive Gripper Finger. This gripper technology is well-suited for agricultural, machine-building, and human-machine collaborative applications.
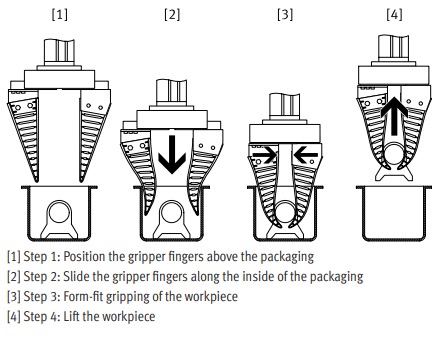
Figure 2. A schematic depicting gentle, malleable finger gripping of a part from a package with the Festo DHAS gripper. Image used courtesy of Festo
Like SCHUNK’s ADHESO gripper, the DHAS gripper finger is also biologically inspired, with a structural design based on a fish’s tail fin. Two malleable bands are connected by horizontal bands, which are connected via flex hinges. The design facilitates gentle gripping of a wide range of curved-edged objects and is suitable for use as part of angle, radial, and long-stroke grippers.
Soft Part Grippers
Soft-gripping robots are an important modern adaptation to the growing requirements of the food and beverage industry. Packaged foods must be handled carefully, maintaining high hygiene standards and requiring a sensitive touch so as not to cause damage and contribute to food waste.
The food-grade OnRobot Soft Gripper is designed with silicone fingers for handling organic materials and/or those with deformable, irregular surfaces (such as ginger, bread, eggs, fruit, drink bottles, and more). No external air supply is required–saving on maintenance costs–and pre-integrated software is designed to simplify set-up and speed up deployment.
Figure 3. The OnRobot Soft Gripper features compatibility with a range of robot brands, including KUKA, Fanuc, ABB, Kawasaki, and many more. Video used courtesy of OnRobot
The 2.2 kg Soft Gripper comes with three interchangeable silicone cups (SG-a-H, SG-a-S, SG-b-H) depending on the gripper shape required. Each silicone cup complies with FDA (Food and Drug Administration) 21 CFR (Code of Federal Regulations, for non-fatty food items) and EC 1935/2004 for food handling.
While the OnRobot Soft Gripper is an ideal choice for the direct handling of organic materials and unpackaged foods, the SMC ZNC Series Bernoulli Gripper might be an attractive choice if indirect physical contact, which minimizes the risk of contamination and damage.
Another bio-inspired gripper, the Dobot Soft-touch Flexible Gripper, employs what look like short tentacles, mimicking the gripping action of octopus tentacles. Customers can choose from two, three, or four finger configurations and select interchangeable soft beaks depending on preferred payload capacity, size, and working pressure range. While ideally suited to soft fruit and vegetable picking applications, the Dobot gripper is also suitable for small electronic part handling, pharmaceuticals, catering, and other industries.
Large-Stroke and High-Force Grippers
Now let’s see some rugged, high-force robotic grippers for heavy-duty, high-throughput applications such as automotive part handling, CNC machining, and machine tending.
The 3FG15 three-finger gripper from OnRobot eliminates the need for manual modifications or end-of-arm tool changes with a large stroke capable of accommodating objects from 20 mm to 150 mm wide. This adaptability is particularly useful in automated cells/job shops where items with different diameters are waiting to be machined.
Furthermore, large-stroke grippers offer solid handling while loading and unloading through firm, centered gripping, which preserves accuracy and lowers the possibility of component slippage or misalignment in the chuck. The fingertips are customizable to facilitate gripping parts of different sizes and shapes. The 15 kg 3FG15 gripper provides gripping force of between 10 N and 240 N.
Figure 4. Video used courtesy of RightHand Robotics
With a 2 kg payload capability and three flexible and suction-capable fingers, the RightPick2's RHR Gripper V5 can grip a variety of items, forms, and surfaces. It employs real-time sensor technology and AI algorithms for processing thousands of stock-keeping units, making it suitable for rapid warehouse automation. It offers high-throughput picking and has demonstrated performance in e-commerce fulfilment, parcel sorting, and other logistics processes.
Research-Developed Grippers
Researchers at the University of California San Diego created the GRIP-tape robot gripper, which uses a novel grasping mechanism rather than more conventional hand-like designs. The device uses steel measuring tapes that extend in a rotating fashion and retract with the help of electric motors. The tapes simulate screw movements to grasp or release items. Because the tapes are both rigid and flexible, this design can open bottles, screw in lightbulbs, handle fruits, and turn screwdrivers.

Figure 5. UC San Diego developed the GRIP-tape robotic gripper to grasp items such as lightbulbs, fruit, or tools. Image used courtesy of the UC San Diego
The tape measure-inspired gripper uses two independent electric motors to rotate the steel tapes in an anticlockwise or clockwise fashion to grasp objects and bring them in towards the device, or move objects away and eject them.
Like the soft part grippers we explored earlier in this article, this research-developed gripper is adaptable and suitable for soft fruit picking and can also be used interchangeably to manipulate more rigid objects/components.
Getting a Grip
Deciding on the right gripper technology depends on your application requirements, namely whether you require sensitive, more delicate handling of soft parts or a more powerful force and/or precision to execute heavy-duty tasks (such as might be required during CNC machining and machine tending). Speed is also a desired requisite that favors pick-and-place applications in high-throughput warehouses, logistics environments, and production lines where parts need to be delivered promptly to keep up with assembly and overall target production output.
Whatever your decision, new technologies are always on the horizon, which could maximise your operations. To stay in the loop concerning all control automation and robotics technologies, stay tuned to the Control Automation website for more technological insights.












