 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinBasic Process Control Strategies and Control System Configurations - Overview
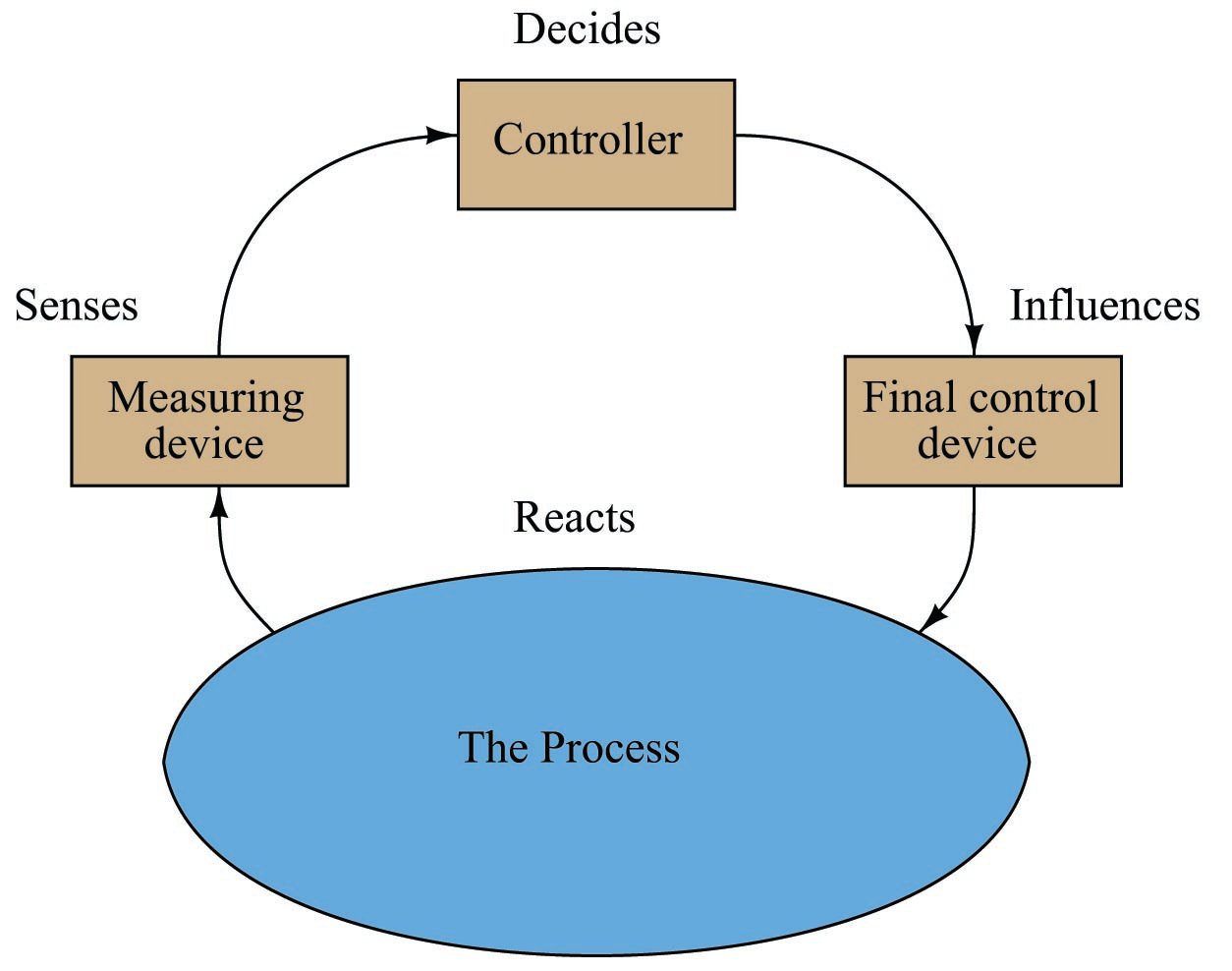
In a simple control system, a process variable (PV) is measured and compared with a setpoint value (SP). A manipulated variable (MV, or output) signal is generated by the controller and sent to a final control element, which then influences the process variable to achieve stable control. The algorithm by which the controller develops its output signal is typically PID (Proportional-Integral-Derivative), but other algorithms may be used as well:
This form of simple control may be improved upon and expanded for a greater range of process applications by interconnecting multiple controllers and/or redirecting measurement and control signals in more complex arrangements. An exploration of some of the more common control system configurations is the subject of this chapter.
