Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinClarence, MOTIF, and Pipebots Expand Robotic Abilities
New research gives robots human-like touch, adaptive mobility, and micro-scale inspection skills to tackle industrial and infrastructure challenges.
The world of scientific research is expanding the possibilities of human sensory perception-infused robotics for Industry 5.0 operations. Target technologies include hand-like grippers, adaptive quadraped robots, and autonomous pipebots for underground pipe inspection. Advanced machine vision, multiple sensors, big data learning repositories, adaptive AI algorithms, and experiential learning support these technologies.
Advancing AI-Supported Autonomous Mobility on the Fly
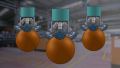
Scientists often look to the animal kingdom for biomechanical structures that can model new robotic innovations. Researchers from the University College London and the University of Leeds have collaborated to bring forward a ground-breaking advancement in autonomous robotic mobility. The team engineered a quadruped robot nicknamed “Clarence” that can navigate and adapt to changing or unfamiliar terrain using deep reinforcement learning and the natural movement strategies of animals.

Clarence learning to traverse simulated environments during reinforcement learning training. Image used courtesy of Joseph Humphreys
Clarence was trained in a simulated environment as part of a reinforcement learning framework, allowing the robot to learn by trial and error, matching terrain with appropriate gait strategies and adapting behaviour to build rewards. Clarence learned to traverse varied environments using different gaits while employing nature-derived animal strategies for conserving energy, modifying gait movements, and retaining gait memory to execute the most efficient mode of travel.
Once virtual training was complete, the team tested Clarence in different real-world settings such as surfaces with wood chips, rocky surfaces, unstable timber, and obstructive tree root systems. Clarence was successful in navigating all terrains. The bio-inspired adaptive AI-based learning framework devised for Clarence could be applied to various four-legged robots, such as quadruped inspection robots in industrial environments or those used for decommissioning abandoned nuclear facilities.
Robotic Technologies Based on Sound and Touch
We are aware of the growing trend in customer service robotics systems in the food and beverage industry with innovative technologies incorporating natural language processing models such as GPT-4 to receive and process verbal information from customers, access and construct instructional code to execute tasks such as opening doors, selecting mugs, and mixing coffee to make the perfect brew. But what innovations in robotic sensory perception are becoming realized that could improve the industrial and customer service/hospitality industries?
University of Southern California researchers have developed the MOTIF (Multimodal Observation with Thermal, Inertial, and Force sensors) robotic hand with integrated depth, thermal, tactile, visual, and inertial measurement unit (IMU) sensors.
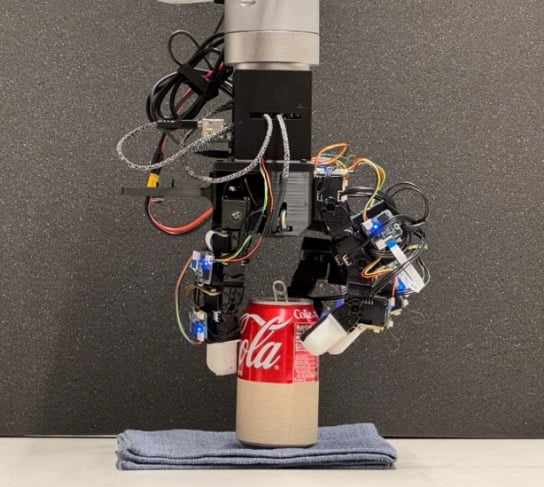
The MOTIF robotic hand can apply the right pressure required to pick up and manipulate objects carefully and without incurring damage. Image used courtesy of Hanyang Zhou et al
During experimentation, the researchers assessed MOTIF’s gripping capacity, paying particular attention to the ability to discern and avoid very hot surfaces of objects. Another experiment evaluated MOTIF’s ability to handle objects of different shapes and mass while performing flicking motions with the fingertips.
The researchers wish to further develop the MOTIF robotic hand for use in home and professional kitchens, as well as industrial environments for cooking and handling other hot objects, as well as applications requiring responsive force feedback and adaptive manipulation when facing specialist, high-temperature tasks such as welding.
Pipebots: Mini Bots Safeguarding Water Infrastructure
Pipebots are mini autonomous robots designed to assess and oversee the UK's immense subterranean water pipe network to avoid breaches and costly disruptions. The Pipebots project, created by an interdisciplinary team directed by Professor Kirill Horoshenkov of the University of Sheffield, is a solution to the estimated daily waste of three billion litres of water caused by undiagnosed flaws and leaks.
The Pipebots project is intended to revolutionize water and waste pipe infrastructure management through targeted autonomous inspection. Video used courtesy of Pipebots
Pipebots are now in the research and development stage, being tested in partnership with leading water corporations to integrate them throughout industry in the future. With their cameras, sensors, and all-terrain legs, these 40 mm robots can explore water pipes, identify possible problems, and send exact data to engineers, eliminating the need for costly and time-consuming road construction.
Experts from the Universities of Sheffield, Birmingham, Bristol, and Leeds collaborate on the project, which is backed by alliances with suppliers including Thames Water and Northumbria Water. Pipebots offer to protect critical infrastructure, cut down on environmental waste, save billions of dollars in repair expenses, and provide the public with more dependable water supplies by facilitating proactive, non-intrusive maintenance.