 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinWhat is a Servo Motor?
Servo motors are common in all kinds of motion control applications for various industries, but what are these devices, and what makes them different from standard AC or DC motors?
A servo motor is a motion control setup that, on the outside, bears a close resemblance to a normal DC/AC motor and drive setup. However, on closer inspection, servo motors hold a special role in motion technology, and the servo drivers require more complex connections and programming than most simple motor drivers.
So what are these motors, and what makes them so special?
In short, a servo motor is a standard motor with a feedback device built right onto the motor or output shaft. The matching amplifier or driver board will automatically use this feedback device to determine the accuracy of the motion.
Industrial Vs. Hobby Servo Motors
First, let’s hit the ground with a bit of a distinction between servos used for industrial applications and those used for projects like microcontroller and remote control (R/C) projects. The basic definition is the same, but the control algorithms, drive technology, and feedback units are very different.
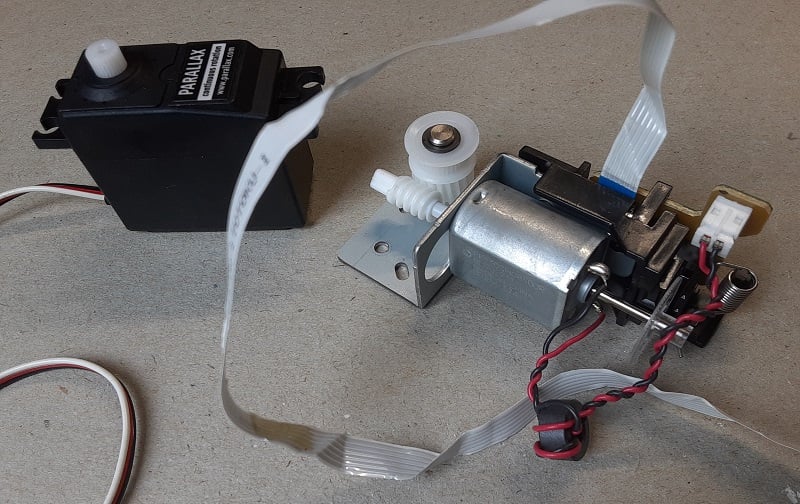
Figure 1. Two small servo motors, one hobby-grade (left) and the other (right) with similar components but using a rotary encoder built onto the integrated driver module. Image used courtesy of the author
A hobby-level servo motor is typically a 3-wire device supplied by a pulse train or a PWM signal from the microcontroller. This does not directly correlate to the 0-100% duty cycle of the signal, as if we were driving the motor speed, but rather it reflects a relative set point between a min/max range of speeds or fixed angular target positions.
Inside the motor, a small integrated circuit (IC) compares the incoming signal from the controller against the reference feedback device. For small servos, this is usually a small potentiometer that changes its output voltage as it is turned. The IC outputs voltage to a small standard DC motor, and as the motor turns, so does the potentiometer, creating an instant feedback loop. The IC can increase or decrease the output signal to the motor based on how closely it matches the target position.
If this strategy brings to mind the idea of PID loops, overshoot, and settling time, you are correct! This is one of the definite advantages (and complexities) of servo motors over standard motor drives.
In reality, hobby motors on an Arduino or R/C project probably don’t rely on PID loops, unless it’s a more advanced algorithm.
Industrial Servo Motors
Although the size and scale of these motors are often larger, the overall concept is quite similar. A standard DC or AC motor is provided with voltage from a servo amplifier (a driver). A feedback device is still essential to ensure that the motor is actually reaching the target position or speed.
In the scope of industrial motion, the feedback is most likely an encoder, either incremental or absolute.

Figure 2. A small industrial-grade DC servo motor. Image used courtesy of the author
What Are Servos Used For?
Servos can provide motion for machines in a few common scenarios:
Fixed Angle Set Points
This is easily recognizable in the scope of a robot arm joint. Any 6-axis or SCARA robot will be commanded to a certain position, and it must be reached quickly, with the highest torque possible, and with little to no overshoot from the target position. Obviously, it must also reach the fixed position with incredible accuracy.
These requirements force the use of a tightly controlled servo motor at each joint, carefully chosen with the right torque settings and a very accurate encoder. Many robots use absolute encoders, but if an incremental encoder is used, a battery module is critical to retain position during power cycles.
Preset Motion Paths
Motion paths, also called motion profiles, are some of the most fascinating uses for a motor. A motion profile is far more complex than simply ‘connect the dots’. Much like robot teaching, each motion in the path must adhere to a specific accel, decel, top speed, or even a change in speed between the endpoints.
In purely mechanical systems, cams are the drivers of irregular motion profiles, determined by the lobes of a rotating disk at a fixed RPM, translating to linear motion. Servos can replace the friction, maintenance, and difficulty in editing cam-based motion systems.
Target RPM
Although more basic than motion profiling, it can be very important to ensure that your motor is actually running at the target RPM, regardless of load conditions. In a normal VFD or motor driver, the voltage is sent out without feedback. The motor may be spinning, but perhaps at the wrong speed as the load increases. There may not even be a motor attached to the drive!
In a target RPM scenario, the voltage or frequency can be adjusted to compensate for many effects from outside factors. If the motor is meant to run at a much lower speed, but we want more accuracy, a gear drive may be employed to change the ratio of motor:encoder speed, but also to reduce the effects of the inertia of the load machinery.
Linear Actuator Servos
Just like cams convert rotation to linear motion in a mechanical system, linear actuators rely on lead or ball screws or other mechanisms to convert motor energy into a feedback-based linear profile.
Many linear systems use magnetic strip encoders or magnetostrictive position sensors to measure the exact extension of an actuator, but an encoder on the motor can work just as well. The downside of an encoder is that the pulse series is much harder to translate than a simple 4-20 mA output of a sensor. Enter the benefits of a servo motor drive, where the encoder feedback is built right in!

Figure 3. A servo driver board (complete with authentic battle damage), with connections for the motor and power, encoder feedback, signals, and networking. Image used courtesy of the author
How Do You Use a Servo?
This is an important question, but unfortunately, it’s hard to answer easily due to the variety of manufacturers. Most servos use OEM-provided configuration software to set up the driver, match it to the motor, and determine what control signals will be accepted and how the motor will drive.
In the end, this is a bit more complicated than simple VFDs or DC motor drivers, but the overwhelming benefits of finite control and knowledge about the accuracy of the system can greatly outweigh the cost of these more advanced motion control devices.












Servo systems are one of those technologies that seem simple on the surface—just a motor with feedback—but that feedback fundamentally changes what the system can do. The ability to continuously compare commanded motion with actual motion is what enables the precision, repeatability, and dynamic performance required in robotics, CNC machinery, and advanced automation. Without feedback, you’re essentially hoping the motor reached its target; with a servo, you know whether it did and can correct errors in real time.
_____________
Alexandra
RDC Control