Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinWhat is the Difference Between Accuracy, Precision, and Resolution?
The differences between accuracy, precision, and resolution are important but challenging to narrow down. This article introduces the characteristics and concepts of each concept.
When you look across the web, understanding the differences between accuracy, precision, and resolution seems to be a common question. However, finding clear answers is challenging. Colloquially, accuracy and precision tend to be used almost interchangeably.
While all these concepts are related, they are actually very different from one another.
On the surface, one might find diagrams that show a dartboard, while others show ideal vs. non-ideal analog-to-digital conversion steps. These are a good start, but neither goes beyond really helping anyone know what is better or, more importantly, what is good enough. Having a grasp of these concepts allows the system designer or someone trying to troubleshoot a system to understand how to avoid problems and correct any encountered problems.
At first glance, one would think that this is an easy concept, but while preparing to write this, I reached out to a few people, asking them what the differences were between these two concepts. Initially, people started out on the right track. However, when it came to narrowing down the differences, it was hard to do.
Accuracy vs. Precision Using Targets
Let us start by examining a few of the familiar diagrams to get an initial baseline on the differences between accuracy and precision, as well as relating these terms to resolution.
Here is a typical target example that is shown when trying to introduce this concept.
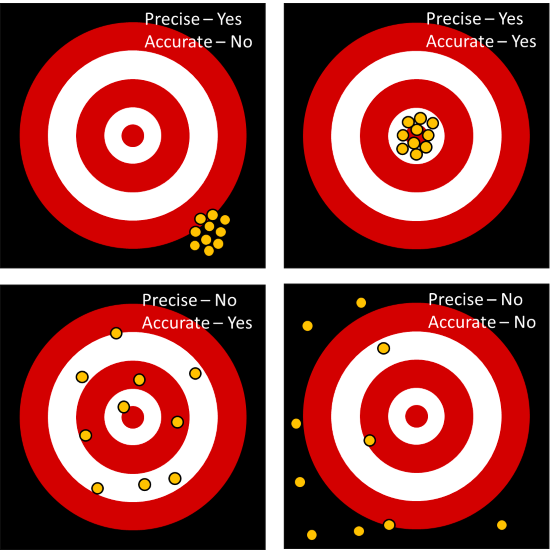
Figure 1. Basic diagrams for an initial baseline using targets.
Visually, in many ways, it is self-explanatory. The dart hits may be loosely scattered across the board, or they may be tightly grouped. The tighter the grouping, the more precise the throw. In engineering terms, this means that a motion control system with the ability to land on exactly the same point time after time is quite precise. If you are working with very tiny objects, precision is critical.
However, a tight group of dart throws might not actually land on the bull's-eye; they may not even be close. The closer to the bull's-eye, the more accurate the throw. In engineering terms, this means that sending a position value to a motion controller that lands the machine right on that target is quite accurate. No system can tolerate inaccuracy, no matter how big or small the target is. Calibration is very important to ensure accuracy.
Repeated attempts are averaged, so if the shots are scattered equally across the board, the accuracy may still be, on average, quite good. But in this case, our precision would be poor.
Changing the Resolution
In this dartboard scenario, we are looking to add up points according to each dart's position on the board. However, with only a few rings, we do not have very continuous measurements. On the left board, we only have five rings. This means that several darts will be located in each ring, even if they are at inconsistent distances from the center. If we increase the number of rings, we can get a bit more exact feel for how far each dart lands from the center. The number of rings is the resolution of the measurement. If we increased the number of rings, we gain more resolution in the measurement.

Figure 2. Increasing the number of rings increases the resolution.
With the new target, we have increased our resolution to measure seven rings, but the overall accuracy of the solution has not changed. We are just able to better score each throw.
In fairness, while the real accuracy has not changed, the overall measured accuracy may change. When we see something visually, we are quickly evaluating it in an analog mode, but the resolution is inherently a digital property (we are not talking about range in this discussion). If we were to reduce the number of bands to the extreme as shown below, we would have very little ability to measure accuracy or precision.

Figure 3. Reducing the number of rings greatly reduces the ability to measure accuracy or precision.
In the above two cases, we maintained the same data set but reduced the resolution to a point that it's simply a binary value: bull's-eye or no bull's-eye. Very little information can be derived with regard to accuracy and precision in the low-resolution target.
In engineering terms, the resolution is entirely dependent on the sensory devices used. The rings are our ability to 'see' each throw and determine where it landed. Likewise, an encoder or distance sensor will be employed in motion control to measure each movement. The more steps used in each measurement, the higher the resolution. In measurement, resolution is quoted in bits. 10-bit to 14-bit resolutions are fairly common across most general-purpose sensors, encoders, and input modules.
Next Steps: Variation, Error, and Analysis
Now that we have visually laid the groundwork, we will begin to look at the math involved as well as a few sources of sensor variation and error that we need to take into account when analyzing our data in the next part of this series. Looking at these things helps us decide how to deal with some of the issues that present themselves with respect to accuracy and resolution, and how we can begin to work through them.
All images used courtesy of the author
Revised: Original article published 11/2020