 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinSafe2Link System Enhances Mobile Robot Safety and Control
The Anybus Safe2Link from HMS Networks centralizes safety control for mobile robots, offering TÜV-certified SIL 3 and PLe/Cat. 4 protection.
HMS Networks is building out its functional safety portfolio with the release of the TÜV-certified Anybus Safe2Link Remote IO-CS. The system centralizes safety-critical information from sensors and other input devices on automated guided vehicles (AGVs) or autonomous mobile robots (AMRs). It delivers it directly to the control system or PLC to ensure rapid response and avoid safety hazards.

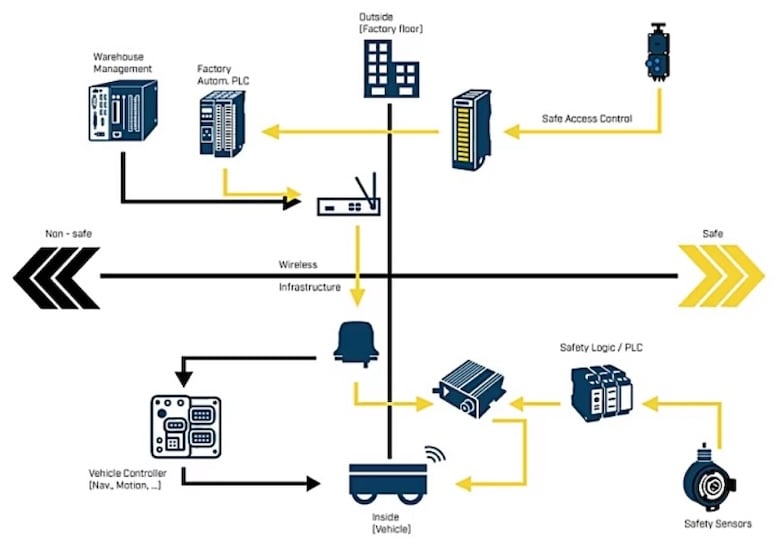
Anybus Safe2Link Remote IO-CS from HMS Networks is a safety-enhancing device for AMRs and AGVs with CIP Safety over EtherNet/IP. Image used courtesy of HMS Networks
Safety Certification and Durability
TÜV-certification is internationally recognized and shows prospective customers that the Anybus Safe2Link Remote IO-CS meets stringent safety and quality standards. The durable IP54 enclosure protects against water sprays from any direction and limits the ingress of dust and other particulates. The Anybus Safe2Link also features M12 Ethernet connectors made from durable materials suitable for use in harsh industrial settings. The Anybus Safe2Link is a plug-and-play type-approved safety device with a Sistema library for streamlining safety function approval.
The Anybus Safe2Link is certified to SIL 3, which means it is highly reliable at performing its safety function with a low probability of failure. The device complies with another fault-tolerant standard, PLe/Cat. 4, which attests to a low probability of failure and its inbuilt redundancy, where if one part of the system fails, another maintains the safety function. The SIL 3 and PLe/Cat. 4 certifications reduce development time and speed up system approvals for AMRs and other mobile machinery for original equipment manufacturers and systems integrators. Additionally, its robust, fault-tolerant architecture minimizes downtime and strengthens operational continuity.
A schematic depicting a use case for the Anybus Safe2Link in an industrial environment. Image used courtesy of HMS Networks
Safety Stops and Retrofitting
When a safety trigger is activated, the Anybus Safe2Link initially instructs the mobile robot to start a controlled speed reduction to preserve stability. Following this secure ramp-down, Safe Torque Off (STO) is used to remove the power supply from the drive motors safely. Thanks to this two-step procedure, the mobile robot will stop securely and consistently while avoiding abrupt shocks.
The Anybus Safe2Link provides control engineers with strong benefits that improve operational safety and expedite the implementation of mobile robotics. Its embedded non-safe I/Os offer highly precise remote power management over power-intensive elements such as main controllers and drives, considerably increasing battery lifespan and facilitating system restarts for optimal energy usage.
With little installation work, the AnyBus Safe2Link offers the crucial remote stop functions required by current regulations (such as ISO 3691-4 and EU 2023/1230). Its adaptable address setting, broad temperature range, and compact size provide more rapid, scalable implementation for both new applications and legacy systems because it was created with the needs of dynamic, ever-evolving industrial systems in mind.












