 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinHow Does a DC Motor Work?
Modern circuitry and technology have allowed innovations in DC motor applications, leading to distinct differences between brushed and brushless DC motors.
Motors supplied with alternating current (AC) have a natural advantage in that the current is constantly fluctuating from positive to negative. This means the magnetic field automatically reverses regularly, providing a continual push-pull action that keeps the motor rotating. DC motors do not have this natural advantage, so there must be strategies for keeping the motor rotating, either using brushes or an alternative.
Brushed and Brushless DC Motors
Industrial electricians are often familiar with two varieties of motors, AC and DC. It is more common for AC motors to be used in permanent applications where the equipment is connected to an outlet or 3-phase line inputs.
These AC motors operate smoothly with relatively high efficiency. However, we don’t always easy access to alternating current.
Mobile applications, usually powered by batteries or solar cells, rely heavily on DC motors. These direct current motors traditionally consume more power than their AC counterparts for similar load applications. This makes them less ideal for large power applications, as DC motors can generate more waste heat.
Brushed Motors
It's important to note that there is no such thing as a brushed AC motor. AC motors automatically alternate current and magnetic field direction, first pushing the rotating rotor, then pulling, then pushing, always keeping the rotor moving. This applies to both 1-phase and 3-phase motor architectures.
DC motors are different. If a DC current were applied to windings inside an AC motor, there would be a brief magnetizing of the coils, and the rotor would turn until the N-S poles of the rotor matched with the opposing field from the coils. Then it would ‘stick’ like the attractive magnet that it is.
To counter this problem, traditional DC motors use a pair of soft carbon brushes that provide contact from the incoming wires to the opposite sides of the rotating rotor in the middle. The brushes are naturally the reason these are called ‘brushed’ DC motors, although they may not always include the term. If you purchase a regular ‘DC Motor’, you could probably assume it is operated with internal brushes.
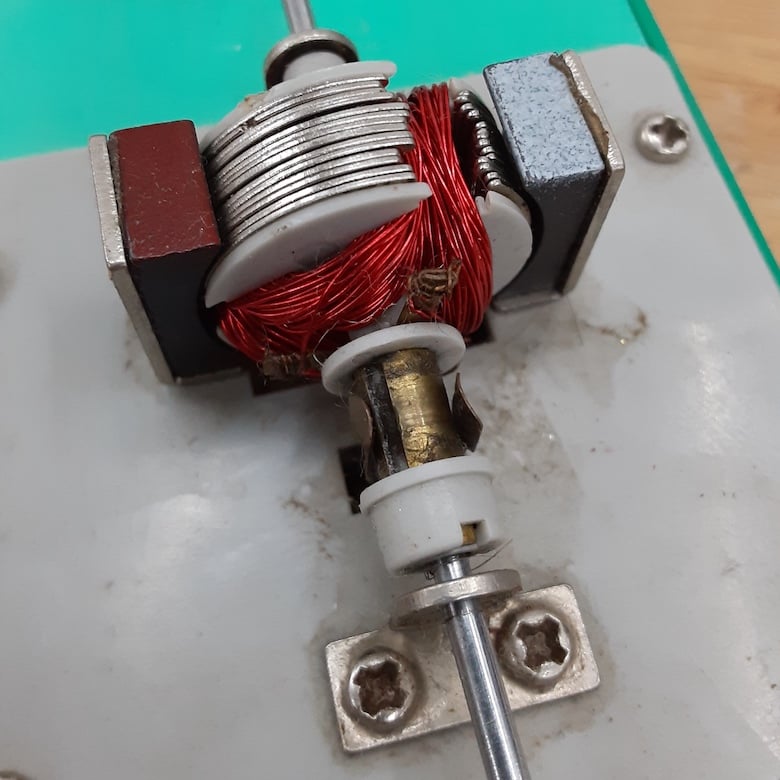
Figure 1. This cutaway sample motor shows the ‘brushes’ as the brass tabs on both sides of the shaft. The metal contacts on the shaft are separated to cleanly switch from the static DC + and - on the outside to reverse the polarity of the armature windings on the rotor.
The rotor on the inside of the motor has a set of separated metal plates, at least two of them, attached to the shaft. The brushes from the external wires will physically contact two of the plates, energizing them and therefore magnetizing the coils in the center (the armature). Just as the rotating magnet is about to line up with the external fixed magnetic field, the brushes will slide onto the next set of plates, changing the coil polarity at just the right moment.
The nice thing about this system is that the field will change polarity at the right moment no matter the motor RPM, since the plates on the shaft rotate along with the rotor, making it a self-adjusting system.
A major downside to this brushed system is the friction and dust generated by the wearing of the brushes. Physical contact always leads to friction and waste heat loss. It will also lead to maintenance factors and regular replacement of the spring-loaded brushes.
Additionally, those coils being energized, then the brushes moving to the next set of plates creates a reverse voltage, often called ‘flyback.’ This generates a spark that would be clearly visible if you could see inside the motor where the brushes touch the shaft.
Regarding the magnetic field on the outside of the motor, there are two common schemes. Some small motors have permanent rare-earth magnets on the outside. Most RC cars and hobby motors use this method - this is obvious when the screwdriver sticks to the motor. Alternatively, field windings may exist around the outside of the motor that is permanently energized by the current. The alternation of polarity still happens when the brushes contacting the rotor continually reverse the armature polarity.
Brushless Motors
As the name indicates, there are other strategies for alternating the polarity aside from the noisy, inefficient carbon brushes. Brushless motors rely on transistor circuitry to reverse the direction of the current to the windings regularly, depending on the speed of the motor.
Removing the physical contact improves the efficiency, but it adds difficulty in control since the alternation of the magnetic fields must be kept in time with the RPM of the motor.

Figure 2. Brushless DC motors. Image courtesy of Teknic.
True brushless motors use a device called an ‘electronics speed control’ or ESC to convert signals from a processor (usually pulse-width modulated signals) into a circuit providing alternation by precisely switching certain silicon-controlled rectifiers. These brushless motors can reach high speeds with very high efficiency and are often seen under the blades of drones and other UAVs.
If provided with the proper gear reduction to convert speed to torque, the torque output can be very high. A common modern application for brushless motors is the drive unit for cordless drills from nearly all tool brands.
Note About Stepper Motors
Another type of motor that technically fits in the brushless category is the stepper motor - although these will never be called ‘brushless motors’. The internal circuitry does control the polarity of current through the coils in a similar manner.

Figure 3. This stepper motor does not contain brushes but is almost never referred to as a true brushless motor. It is meant for deliberate, precise step-based motion.
However, the motor is driven by individual distinct step pulses from a driver circuit, making it a slower, yet far more predictable motor. Expect to see stepper motors on nearly every small CNC machine and 3D printer.
Interested in more content about motors? We have plenty to choose from!
Articles:
- 3-phase Motor Types: Synchronous and Induction Motors
- Comparing Single-Phase and Three-Phase Motors
- Understanding Delta Wound Motors for Industrial Applications
- Common Motor Windings and Wiring for Three-Phase Motors
- Three-Wire vs. Six-Wire Three-Phase Motors
- Field-oriented Control (Vector Control) for Brushless DC Motors
Textbook:
Related Content











