Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin3-phase Motor Types: Synchronous and Induction Motors
In this article, we will take a look at the differences between synchronous and induction motors, as well as the two types of induction motors: squirrel cage and wound rotor.
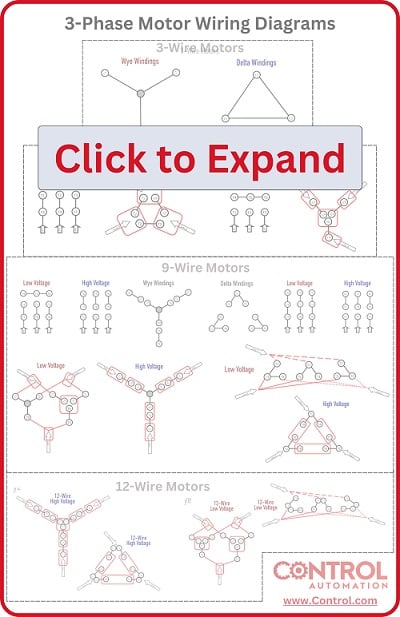
Check out Control Automation's exclusive eBook on motor wiring

3-phase motors are the backbone of automation and industrial processes. These motors are capable of supplying efficient power to a wide range of machine and automation applications. Not all 3-phase motors are created equally, however, and can be categorized based on their construction and processes for taking advantage of electrical potential.
Synchronous motors rotate at a constant (non-variable) speed using permanent magnets or electromagnets in the rotor to keep perfect time with the true AC energy supplied to the stator windings. Induction motors can rotate at variable speeds, passing the magnetic force to the rotor by means of induction, as the name implies, allowing them to apply a force relative to the frequency of the incoming voltage.
Synchronous Motor vs Induction Motor
3-phase motors are either synchronous or asynchronous (also known as induction motors). Asynchronous (induction) motors can be further categorized into two different types based on their construction: the squirrel cage induction motor and the wound rotor induction motor.
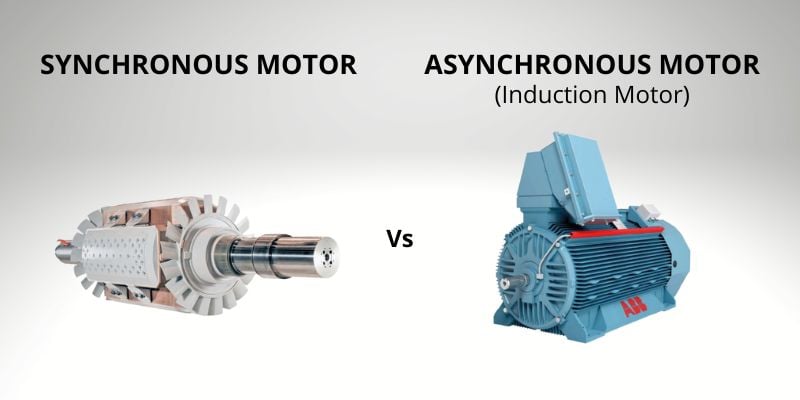
Figure 1. Synchronous and asynchronous motors are both 3-phase motors, however, they operate on different principles. Images adapted and used courtesy of ABB
Are you a motor troubleshooting expert? Quiz yourself with our (no pressure) worksheet!
What is a Synchronous Motor?
A 3-phase synchronous motor operates at a synchronous speed and the rotor poles align with the rotating stator poles. When the poles are aligned, the motor is said to be operating at synchronous speed. This type of motor always operates at synchronous speed, meaning variable speed is not possible with a synchronous motor.
Synchronous motors often need a secondary DC power supply in order to feed and magnetize the rotor, the DC current is fed to the motor through the use of split rings. Permanent magnets can be used on the rotor as well. Since the motor needs to be operating at synchronous speed to work, a starting boost mechanism is usually necessary to initally spin the motor up to near operating speed before the motor can operate properly.
The DC supply for the rotor is usually supplied from the main AC supply, rectified into a DC circuit supplied to the rotor, so while two different supply voltages are required, they both make use of the incoming 3-phase AC supply.
What is an Induction Motor?
Induction motors operate on a different principle than synchronous motors.
Induction is the process of creating current in a conductor by placing it near or inside of a changing magnetic field. Induction is only possible in AC current circuits since it is the changing of the magnetic field when the current switches between states that causes the induced current.
Induction motors use this principle to create mechanical torque from the constant magnetic change created by the alternating current in the windings. Because the stator is fed using three phases, a rotating magnetic field is produced that constantly changes relative to the rotor.
Since the rotation of the magnetic field is relative to the rotor, the rotor will be in a constant state of trying to “catch” the rotating magnetic field. This means that an induction motor will always rotate slower than the speed of the rotating magnetic field.

Figure 2. The rotor of synchronous motors requires a DC power supply. Image used courtesy of ABB
Synchronous Motors
Let’s take a closer look at synchronous motors. Since a synchronous motor is not an induction motor, an electrical supply needs to be attached to the rotor. The power supplied to the rotor needs to be DC power in order to properly energize the rotor windings.
In addition to a DC power supply, synchronous motors need a starting mechanism in order to get the motors up to synchronous speed before the motors can operate under running conditions.
A synchronous motor can be adjusted to have the power factor lagging, in unity or leading by varying the excitation within the rotor. Induction motors are always in the lagging state.
Since synchronous motors are often more complex they usually require more parts and are therefore more expensive. Although their cost may be higher initially, they tend to be more efficient than induction motors, allowing for a recoup of the difference in cost over time.
Induction Motor Types
Now let's explore the two types of induction motors.
Figure 3. A look at the inner configuration of a squirrel cage motor. Image used courtesy of ikaxer
Squirrel Cage Motors
A squirrel cage motor is an induction motor that gets its name from the shape and configuration of the rotor inside of it. Squirrel cage motors do not have any electrical supply connected to the rotor, they gain electrical potential in the rotor solely through induction.
These motors are very simple and maintenance costs and manufacturing costs can be greatly reduced because of it. They do not need brushes or the introduction of any DC current. These motors are robust and rugged for applications in tough environments.
Squirrel cage motors are effective small motors but have a disadvantage when used as larger high kilowatt motors because of their high torque draw upon startup. Because of this, they are less efficient in high torque startup applications but are generally more efficient than wound rotor motors in other applications. Without the availability for variable resistance in the rotor, squirrel cage motors lack the ability for speed control.

Figure 4. A look at the rotor and slip ring of a wound rotor motor. Image used courtesy of ABB
Wound Rotor Motors
Similar to squirrel cage motors, wound rotor motors do not have any electrical supply connected to the rotor, they gain electrical potential in the rotor solely through the process of induction.
The stator on a wound rotor motor is similar to that of the squirrel cage motor, but the rotor is built differently. The rotor is built to include slip rings and brushes that conduct the electricity to the rotor since the rotor in a wound rotor motor is insulated. The purpose of slip rings is to create resistance in series with the rotor windings while the motor is starting. This helps to reduce the current draw of the motor on start up. When squirrel cage motors are started current draw can be near 1000%, causing problems when starting large motors.
Wound rotor motors are more complex and expensive than squirrel cage motors, with the added mechanisms for brushes and slip rings. The expense is necessary though for larger motors that may draw too much current upon startup.
The increased torque available in a wound rotor motor makes them more useful in high torque applications such as elevators and conveyors. They are also advantageous where differing motor speeds are necessary because motor speed can be changed by adding variable resistance back into the rotor circuit similar to the process used on motor startup.
3-phase Motors at a Glance
While the poles of a rotor in a synchronous motor match the speed of the poles in the stator, induction motors have rotors that are trying to “catch” the magnetic field in the poles of the stator.
When choosing a 3-phase motor, it’s important to consider how the motor will be used, the kind of environment it will be used in, the motor’s energy efficiency, and of course, cost. 3-phase motors are useful for a number of automation and manufacturing processes, though they do not all operate the same.
Interested in more content about motors? We have plenty to choose from!
Articles:
- Comparing Single-Phase and Three-Phase Motors
- Understanding Delta Wound Motors for Industrial Applications
- Common Motor Windings and Wiring for Three-Phase Motors
- Three-Wire vs. Six-Wire Three-Phase Motors
- Brushed vs. Brushless DC Motors
- Field-oriented Control (Vector Control) for Brushless DC Motors
- Teardown: What’s Inside a 3-Phase Induction Motor?
Textbook: